$ streamlink https://www.showroom-live.com/ringo-005 best --player="cvlc --sout '#rtp{sdp=rtsp://:8554/}'"
ちなみに、streamlinkのマニュアルを見ると「–player-args」というオプションで引数を渡すことができるとありましたが、「streamlink https://www.showroom-live.com/ringo-005 best –player=cvlc –player-args=”–sout ‘#rtp{sdp=rtsp://:8554/}'”」を実行すると、以下のエラーになってしまって起動できませんでした。
osmc@osmc:~$ streamlink https://www.showroom-live.com/yui-010 worst --player=cvlc --player-args="--sout '#rtp{sdp=rtsp://:8554/}'"
/usr/local/lib/python2.7/dist-packages/requests/__init__.py:91: RequestsDependencyWarning: urllib3 (1.25.2) or chardet (3.0.4) doesn't match a supported version!
RequestsDependencyWarning)
[cli][info] Found matching plugin showroom for URL https://www.showroom-live.com/yui-010
[cli][info] Available streams: 144p (worst), low, high, 1080p (best)
[cli][info] Opening stream: 144p (hls)
[cli][info] Starting player: cvlc
[cli][info] Closing currently open stream...
Traceback (most recent call last):
File "/usr/local/bin/streamlink", line 11, in <module>
sys.exit(main())
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/main.py", line 1033, in main
handle_url()
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/main.py", line 594, in handle_url
handle_stream(plugin, streams, stream_name)
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/main.py", line 447, in handle_stream
success = output_stream(plugin, stream)
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/main.py", line 320, in output_stream
output.open()
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/output.py", line 24, in open
self._open()
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/output.py", line 221, in _open
self._open_subprocess()
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/output.py", line 242, in _open_subprocess
args = self._create_arguments()
File "/usr/local/lib/python2.7/dist-packages/streamlink_cli/output.py", line 203, in _create_arguments
args = self.args.format(filename=filename)
KeyError: 'sdp=rtsp'
osmc@osmc:~$ streamlink https://www.showroom-live.com/yui-010 best --player="cvlc --sout '#rtp{sdp=rtsp://:8554/}'"
/usr/local/lib/python2.7/dist-packages/requests/__init__.py:91: RequestsDependencyWarning: urllib3 (1.25.2) or chardet (3.0.4) doesn't match a supported version!
RequestsDependencyWarning)
[cli][info] Found matching plugin showroom for URL https://www.showroom-live.com/yui-010
[cli][info] Available streams: 144p (worst), low, high, 1080p (best)
[cli][info] Opening stream: 1080p (hls)
^CInterrupted! Exiting...
[cli][info] Closing currently open stream...
osmc@osmc:~$
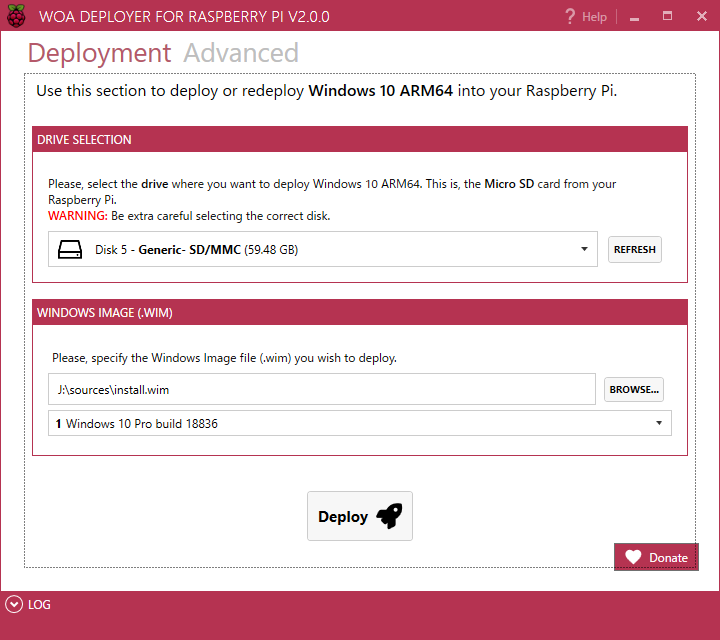
Select type: Windows(Final version) Select version: Feature update to Windows 10, version 1803 [arm64] Select language: ja-jp:Japanese Select edition: 適切に選ぶ Select type download: Download ISO compiler in OneClick!(run downloaded CMD-file)
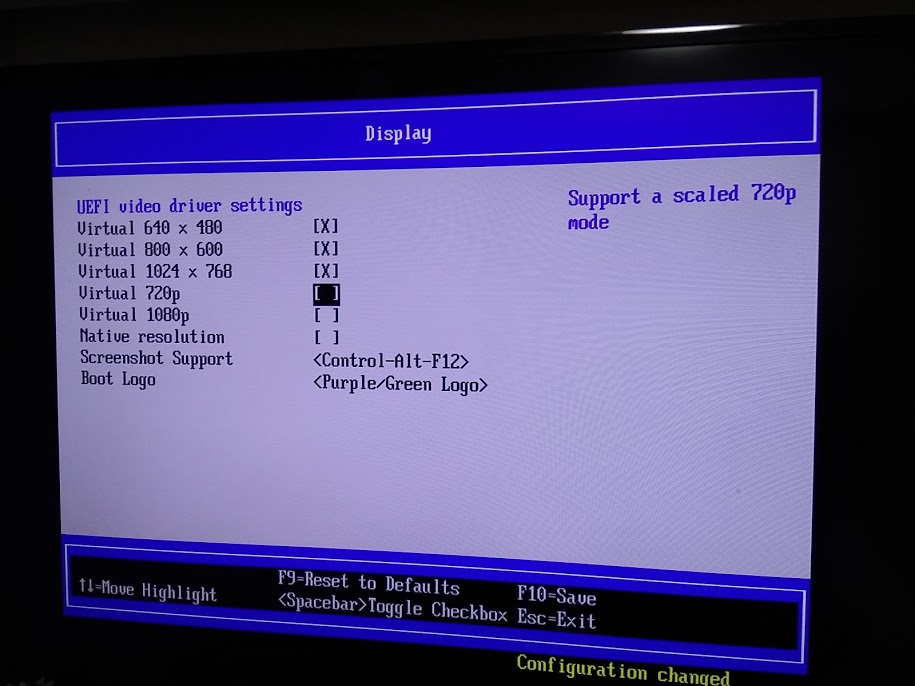
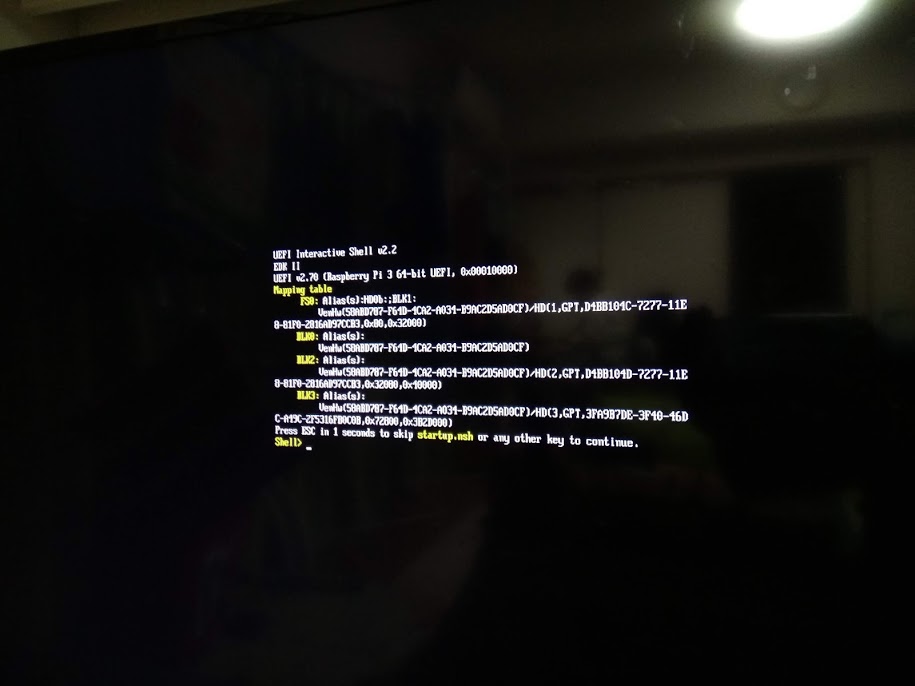
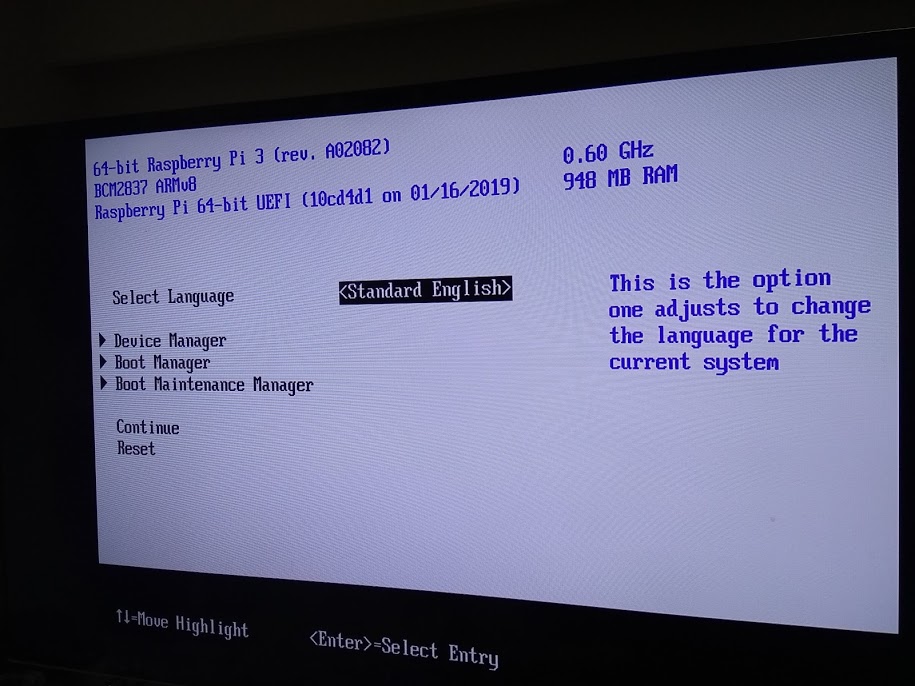
ラズパイ3 Windows 10 on ARM。Core Package 1.4.0で起動させようとしてるんだけど、この2つのクラッシュ再起動を必ず経由しないとキーボードレイアウト選択に届かないんだけど・・・あと、届いてもキーボード/マウスが動かない pic.twitter.com/zhtLJ3UwWQ