[root@esxi:/vmfs/volumes/~/iso] esxcli softwar
e component apply -d /vmfs/volumes/~/iso/VMwar
e-amd-zen-ipmi_thermal_910.1.0.0006-5vmw.803.0.0.24022510.zip
Installation Result
Message: The update completed successfully, but the system needs to be rebooted for the changes to be effective.
Components Installed: VMware-smntemp_910.1.0.0006-5vmw.803.0.0.24022510
Components Removed:
Components Skipped:
Reboot Required: true
DPU Results:
[root@esxi:/vmfs/volumes/~/iso]
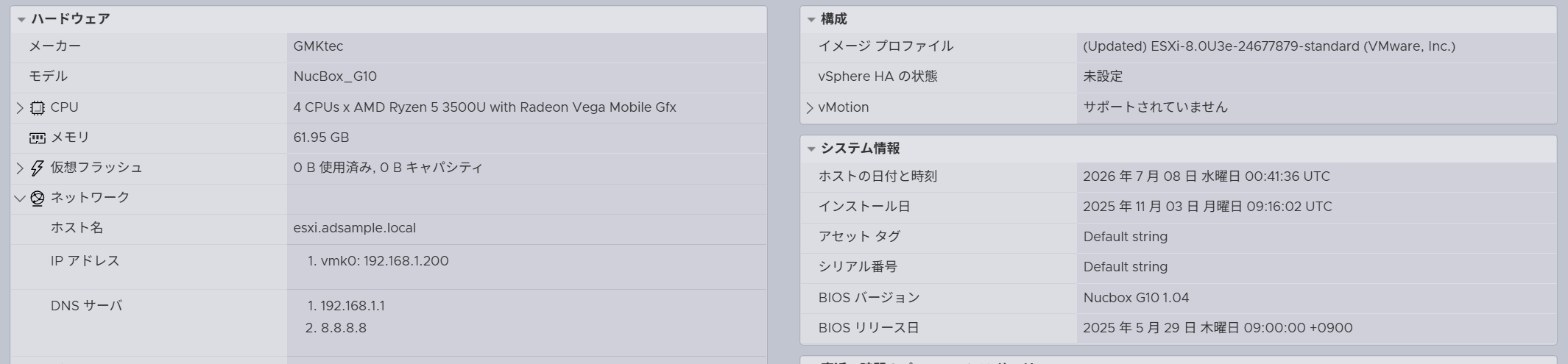
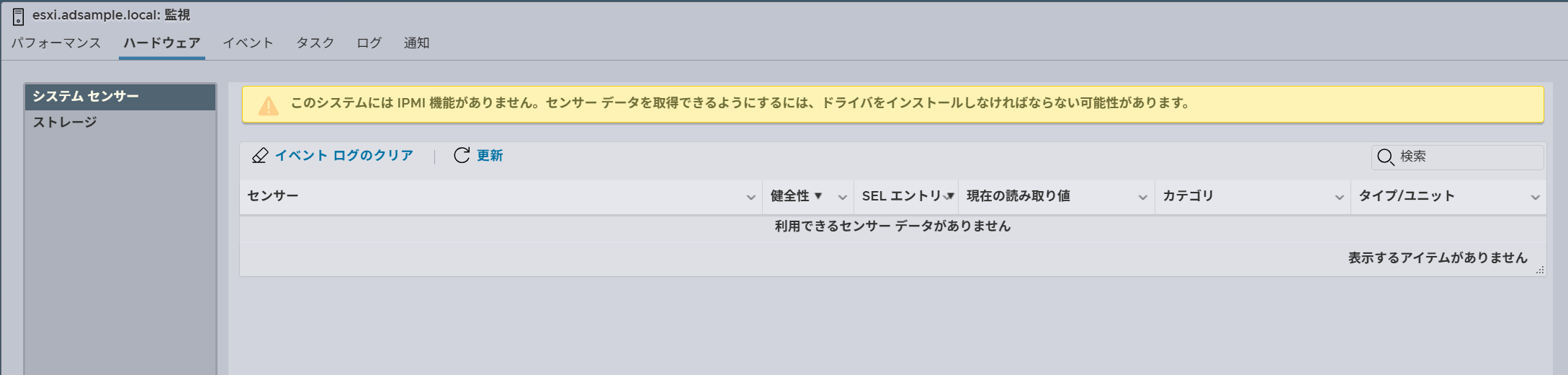
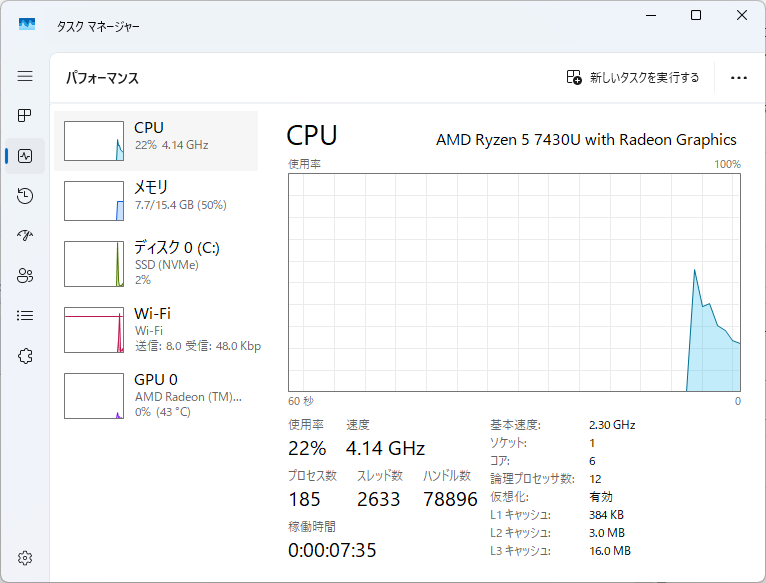
ドライバインストール後はESXi再起動必須
再起動後、ステータスを確認すると、CPU温度を認識するようになった
CLIでも認識するようになった
[root@esxi:~] esxcli hardware ipmi sdr list
Node-Sensor Description Entity-Instance Computed Reading Base Unit Raw Reading Sensor Type Timestamp/Comment Raw Formatted-Raw
----------- --------------------- --------------- ---------------- --------- ----------- ----------- ------------------- --- -------------
0.1 Processor 1 CPU0_Tctl 3.1 59 degrees C 59 Temperature 2026-07-08T00:56:20
[root@esxi:~]
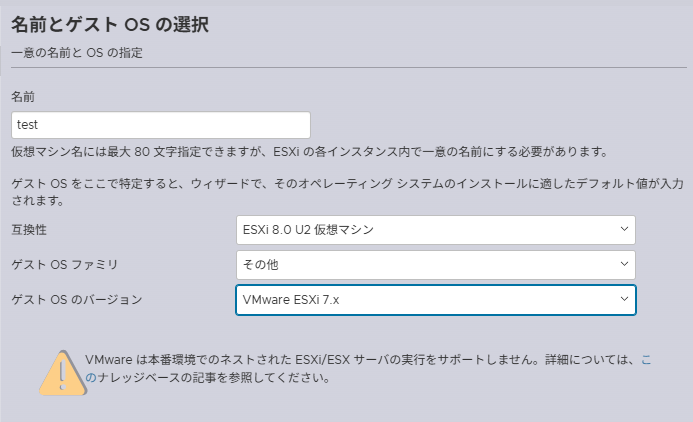
Arduiono上では、ボードマネージャにESP32追加し、ESP32 C3 Dev boardを選択して、サンプルを書き込み
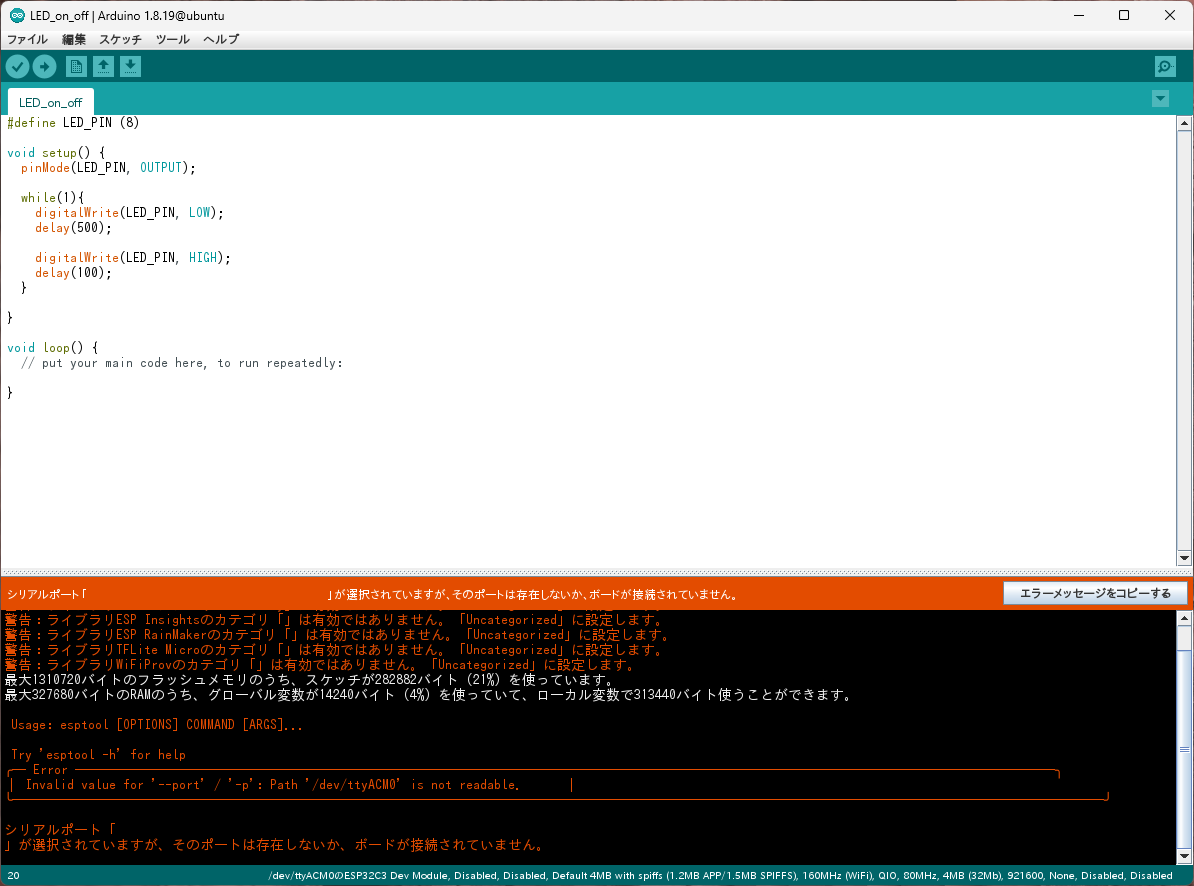
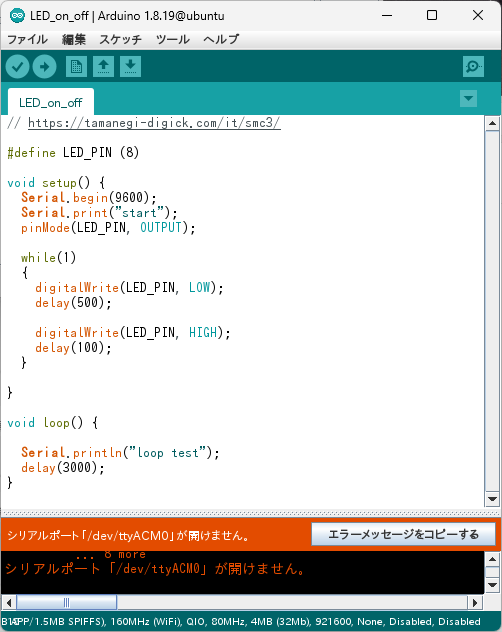
エラー発生
Arduino:1.8.19 (Linux), ボード:"ESP32C3 Dev Module, Disabled, Disabled, Default 4MB with spiffs (1.2MB APP/1.5MB SPIFFS), 160MHz (WiFi), QIO, 80MHz, 4MB (32Mb), 921600, None, Disabled, Disabled"
警告:ライブラリESP_SRのカテゴリ「Sound」は有効ではありません。「Uncategorized」に設定します。
警告:ライブラリHashのカテゴリ「Security」は有効ではありません。「Uncategorized」に設定します。
警告:ライブラリESP Insightsのカテゴリ「」は有効ではありません。「Uncategorized」に設定します。
警告:ライブラリESP RainMakerのカテゴリ「」は有効ではありません。「Uncategorized」に設定します。
警告:ライブラリTFLite Microのカテゴリ「」は有効ではありません。「Uncategorized」に設定します。
警告:ライブラリWiFiProvのカテゴリ「」は有効ではありません。「Uncategorized」に設定します。
最大1310720バイトのフラッシュメモリのうち、スケッチが282882バイト(21%)を使っています。
最大327680バイトのRAMのうち、グローバル変数が14240バイト(4%)を使っていて、ローカル変数で313440バイト使うことができます。
Usage: esptool [OPTIONS] COMMAND [ARGS]...
Try 'esptool -h' for help
╭─ Error ──────────────────────────────────────────────────────────────────────╮
│ Invalid value for '--port' / '-p': Path '/dev/ttyACM0' is not readable. │
╰──────────────────────────────────────────────────────────────────────────────╯
シリアルポート「
」が選択されていますが、そのポートは存在しないか、ボードが接続されていません。
「ファイル」メニューの「環境設定」から
「より詳細な情報を表示する:コンパイル」を有効にすると
より詳しい情報が表示されます。
確認してみる
まず、USBデバイスが存在しているかを確認
pcuser@ubuntu:~$ lsusb
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 001 Device 002: ID 0e0f:0003 VMware, Inc. Virtual Mouse
Bus 001 Device 007: ID 0e0f:0002 VMware, Inc. Virtual USB Hub
Bus 001 Device 008: ID 0e0f:0002 VMware, Inc. Virtual USB Hub
Bus 001 Device 022: ID 303a:1001 Espressif USB JTAG/serial debug unit
Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
pcuser@ubuntu:~$
ある
rootユーザでesptoolを実行したらどうなる?
root@ubuntu:~# /home/pcuser/.arduino15/packages/esp32/tools/esptool_py/5.1.0/esptool --port /dev/ttyACM0 chip-id
esptool v5.1.0
Connected to ESP32-C3 on /dev/ttyACM0:
Chip type: ESP32-C3 (QFN32) (revision v0.4)
Features: Wi-Fi, BT 5 (LE), Single Core, 160MHz, Embedded Flash 4MB (XMC)
Crystal frequency: 40MHz
USB mode: USB-Serial/JTAG
MAC: ac:eb:e6:6d:6b:b0
Stub flasher running.
Warning: ESP32-C3 has no chip ID. Reading MAC address instead.
MAC: ac:eb:e6:6d:6b:b0
Hard resetting via RTS pin...
root@ubuntu:~#
情報が取得できる
一般ユーザだとどうなる?
pcuser@ubuntu:~$ /home/pcuser/.arduino15/packages/esp32/tools/esptool_py/5.1.0/esptool --port /dev/ttyACM0 chip-id
Usage: esptool [OPTIONS] COMMAND [ARGS]...
Try 'esptool -h' for help
lq Error qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
x Invalid value for '--port' / '-p': Path '/dev/ttyACM0' is not readable. x
mqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqj
pcuser@ubuntu:~$
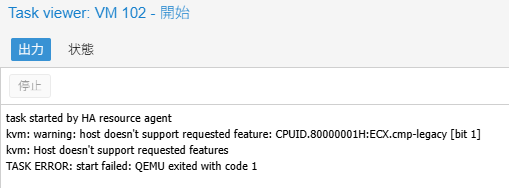
task started by HA resource agent
kvm: warning: host doesn't support requested feature: CPUID.80000001H:ECX.cmp-legacy [bit 1]
kvm: Host doesn't support requested features
TASK ERROR: start failed: QEMU exited with code 1