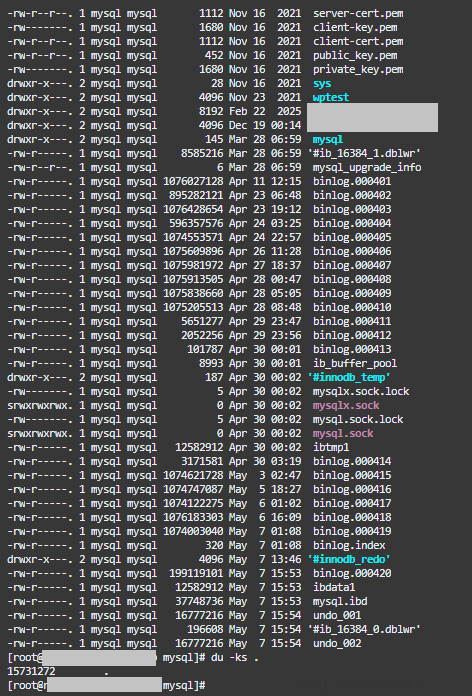
[root@xxxxxxxxxxx mysql]# ls -ltr /var/lib/mysql/binlog*
-rw-r-----. 1 mysql mysql 1076027128 Apr 11 12:15 /var/lib/mysql/binlog.000401
-rw-r-----. 1 mysql mysql 895282121 Apr 23 06:48 /var/lib/mysql/binlog.000402
-rw-r-----. 1 mysql mysql 1076428654 Apr 23 19:12 /var/lib/mysql/binlog.000403
-rw-r-----. 1 mysql mysql 596357576 Apr 24 03:25 /var/lib/mysql/binlog.000404
-rw-r-----. 1 mysql mysql 1074553571 Apr 24 22:57 /var/lib/mysql/binlog.000405
-rw-r-----. 1 mysql mysql 1075609896 Apr 26 11:28 /var/lib/mysql/binlog.000406
-rw-r-----. 1 mysql mysql 1075981972 Apr 27 18:37 /var/lib/mysql/binlog.000407
-rw-r-----. 1 mysql mysql 1075913505 Apr 28 00:47 /var/lib/mysql/binlog.000408
-rw-r-----. 1 mysql mysql 1075838660 Apr 28 05:05 /var/lib/mysql/binlog.000409
-rw-r-----. 1 mysql mysql 1075205513 Apr 28 08:48 /var/lib/mysql/binlog.000410
-rw-r-----. 1 mysql mysql 5651277 Apr 29 23:47 /var/lib/mysql/binlog.000411
-rw-r-----. 1 mysql mysql 2052256 Apr 29 23:56 /var/lib/mysql/binlog.000412
-rw-r-----. 1 mysql mysql 101787 Apr 30 00:01 /var/lib/mysql/binlog.000413
-rw-r-----. 1 mysql mysql 3171581 Apr 30 03:19 /var/lib/mysql/binlog.000414
-rw-r-----. 1 mysql mysql 1074621728 May 3 02:47 /var/lib/mysql/binlog.000415
-rw-r-----. 1 mysql mysql 1074747087 May 5 18:27 /var/lib/mysql/binlog.000416
-rw-r-----. 1 mysql mysql 1074122275 May 6 01:02 /var/lib/mysql/binlog.000417
-rw-r-----. 1 mysql mysql 1076183303 May 6 16:09 /var/lib/mysql/binlog.000418
-rw-r-----. 1 mysql mysql 1074003040 May 7 01:08 /var/lib/mysql/binlog.000419
-rw-r-----. 1 mysql mysql 320 May 7 01:08 /var/lib/mysql/binlog.index
-rw-r-----. 1 mysql mysql 286409863 May 7 16:07 /var/lib/mysql/binlog.000420
[root@xxxxxxxxxxx mysql]#
とりあえず、binlog関連の設定を「show variables like ‘binlog%’;」を実行して確認してみる
[root@xxxxxxxxxxx mysql]# mysql -u root
Welcome to the MySQL monitor. Commands end with ; or \g.
Your MySQL connection id is 50827
Server version: 8.0.45 Source distribution
Copyright (c) 2000, 2026, Oracle and/or its affiliates.
Oracle is a registered trademark of Oracle Corporation and/or its
affiliates. Other names may be trademarks of their respective
owners.
Type 'help;' or '\h' for help. Type '\c' to clear the current input statement.
mysql> show variables like 'binlog%';
+------------------------------------------------+--------------+
| Variable_name | Value |
+------------------------------------------------+--------------+
| binlog_cache_size | 32768 |
| binlog_checksum | CRC32 |
| binlog_direct_non_transactional_updates | OFF |
| binlog_encryption | OFF |
| binlog_error_action | ABORT_SERVER |
| binlog_expire_logs_auto_purge | ON |
| binlog_expire_logs_seconds | 2592000 |
| binlog_format | ROW |
| binlog_group_commit_sync_delay | 0 |
| binlog_group_commit_sync_no_delay_count | 0 |
| binlog_gtid_simple_recovery | ON |
| binlog_max_flush_queue_time | 0 |
| binlog_order_commits | ON |
| binlog_rotate_encryption_master_key_at_startup | OFF |
| binlog_row_event_max_size | 8192 |
| binlog_row_image | FULL |
| binlog_row_metadata | MINIMAL |
| binlog_row_value_options | |
| binlog_rows_query_log_events | OFF |
| binlog_stmt_cache_size | 32768 |
| binlog_transaction_compression | OFF |
| binlog_transaction_compression_level_zstd | 3 |
| binlog_transaction_dependency_history_size | 25000 |
| binlog_transaction_dependency_tracking | COMMIT_ORDER |
+------------------------------------------------+--------------+
24 rows in set (0.00 sec)
mysql>
mysql> PURGE BINARY LOGS BEFORE '2026-05-01 00:00:00';
Query OK, 0 rows affected (0.02 sec)
mysql> show binary logs;
+---------------+------------+-----------+
| Log_name | File_size | Encrypted |
+---------------+------------+-----------+
| binlog.000415 | 1074621728 | No |
| binlog.000416 | 1074747087 | No |
| binlog.000417 | 1074122275 | No |
| binlog.000418 | 1076183303 | No |
| binlog.000419 | 1074003040 | No |
| binlog.000420 | 377894939 | No |
+---------------+------------+-----------+
6 rows in set (0.00 sec)
mysql>
ファイルは・・・削除されていますね
[root@xxxxxxxxxxx mysql]# ls -ltr /var/lib/mysql/binlog*
-rw-r-----. 1 mysql mysql 1074621728 May 3 02:47 /var/lib/mysql/binlog.000415
-rw-r-----. 1 mysql mysql 1074747087 May 5 18:27 /var/lib/mysql/binlog.000416
-rw-r-----. 1 mysql mysql 1074122275 May 6 01:02 /var/lib/mysql/binlog.000417
-rw-r-----. 1 mysql mysql 1076183303 May 6 16:09 /var/lib/mysql/binlog.000418
-rw-r-----. 1 mysql mysql 1074003040 May 7 01:08 /var/lib/mysql/binlog.000419
-rw-r-----. 1 mysql mysql 96 May 7 16:25 /var/lib/mysql/binlog.index
-rw-r-----. 1 mysql mysql 383435241 May 7 16:25 /var/lib/mysql/binlog.000420
[root@xxxxxxxxxxx mysql]#
[root@xxxxxxxxxxx ~]# ls -ltr /var/lib/mysql/bin*
-rw-r-----. 1 mysql mysql 1074747087 May 5 18:27 /var/lib/mysql/binlog.000416
-rw-r-----. 1 mysql mysql 1074122275 May 6 01:02 /var/lib/mysql/binlog.000417
-rw-r-----. 1 mysql mysql 1076183303 May 6 16:09 /var/lib/mysql/binlog.000418
-rw-r-----. 1 mysql mysql 1074003040 May 7 01:08 /var/lib/mysql/binlog.000419
-rw-r-----. 1 mysql mysql 1074323672 May 8 03:18 /var/lib/mysql/binlog.000420
-rw-r-----. 1 mysql mysql 1073965591 May 8 16:47 /var/lib/mysql/binlog.000421
-rw-r-----. 1 mysql mysql 1074897443 May 10 12:39 /var/lib/mysql/binlog.000422
-rw-r-----. 1 mysql mysql 128 May 10 12:39 /var/lib/mysql/binlog.index
-rw-r-----. 1 mysql mysql 576882057 May 11 14:17 /var/lib/mysql/binlog.000423
[root@xxxxxxxxxxx ~]#
さらに翌日確認して、間違いなく増加率が激減していることを確認した
[root@xxxxxxxxxxx ~]# ls -ltr /var/lib/mysql/bin*
-rw-r-----. 1 mysql mysql 1074747087 May 5 18:27 /var/lib/mysql/binlog.000416
-rw-r-----. 1 mysql mysql 1074122275 May 6 01:02 /var/lib/mysql/binlog.000417
-rw-r-----. 1 mysql mysql 1076183303 May 6 16:09 /var/lib/mysql/binlog.000418
-rw-r-----. 1 mysql mysql 1074003040 May 7 01:08 /var/lib/mysql/binlog.000419
-rw-r-----. 1 mysql mysql 1074323672 May 8 03:18 /var/lib/mysql/binlog.000420
-rw-r-----. 1 mysql mysql 1073965591 May 8 16:47 /var/lib/mysql/binlog.000421
-rw-r-----. 1 mysql mysql 1074897443 May 10 12:39 /var/lib/mysql/binlog.000422
-rw-r-----. 1 mysql mysql 128 May 10 12:39 /var/lib/mysql/binlog.index
-rw-r-----. 1 mysql mysql 867993952 May 12 11:46 /var/lib/mysql/binlog.000423
[root@xxxxxxxxxxx ~]#
2026/05/21追記
落ち着いたかと思ったら、またかーーー
-rw-r-----. 1 mysql mysql 56 Nov 16 2021 auto.cnf
-rw-r-----. 1 mysql mysql 880718553 May 14 03:39 binlog.000424
-rw-r-----. 1 mysql mysql 1074983980 May 15 22:05 binlog.000425
-rw-r-----. 1 mysql mysql 1074458947 May 16 01:00 binlog.000426
-rw-r-----. 1 mysql mysql 1076353655 May 16 04:11 binlog.000427
-rw-r-----. 1 mysql mysql 1075894927 May 16 11:45 binlog.000428
-rw-r-----. 1 mysql mysql 1076430757 May 16 20:30 binlog.000429
-rw-r-----. 1 mysql mysql 1074418130 May 17 01:11 binlog.000430
-rw-r-----. 1 mysql mysql 1075734983 May 17 17:52 binlog.000431
-rw-r-----. 1 mysql mysql 1074210923 May 18 13:17 binlog.000432
-rw-r-----. 1 mysql mysql 1074818836 May 18 19:42 binlog.000433
-rw-r-----. 1 mysql mysql 1075645558 May 19 00:18 binlog.000434
-rw-r-----. 1 mysql mysql 1074848030 May 19 10:46 binlog.000435
-rw-r-----. 1 mysql mysql 1075579091 May 19 15:20 binlog.000436
-rw-r-----. 1 mysql mysql 1076234338 May 19 20:25 binlog.000437
-rw-r-----. 1 mysql mysql 618166201 May 20 03:45 binlog.000438
-rw-r-----. 1 mysql mysql 1075233776 May 20 15:03 binlog.000439
-rw-r-----. 1 mysql mysql 1076237754 May 20 18:18 binlog.000440
-rw-r-----. 1 mysql mysql 1074276162 May 20 21:19 binlog.000441
-rw-r-----. 1 mysql mysql 227580182 May 21 11:19 binlog.000442
-rw-r-----. 1 mysql mysql 304 May 20 21:19 binlog.index
もう set PERSIST binlog_expire_logs_seconds=1; を設定してしまおう・・・・(0が無限扱いだといやなので数値入れとくか的な)
mysql> set PERSIST binlog_expire_logs_seconds=1;
Query OK, 0 rows affected (0.00 sec)
mysql> show variables like 'binlog%';
+------------------------------------------------+--------------+
| Variable_name | Value |
+------------------------------------------------+--------------+
| binlog_cache_size | 32768 |
| binlog_checksum | CRC32 |
| binlog_direct_non_transactional_updates | OFF |
| binlog_encryption | OFF |
| binlog_error_action | ABORT_SERVER |
| binlog_expire_logs_auto_purge | ON |
| binlog_expire_logs_seconds | 1 |
| binlog_format | ROW |
| binlog_group_commit_sync_delay | 0 |
| binlog_group_commit_sync_no_delay_count | 0 |
| binlog_gtid_simple_recovery | ON |
| binlog_max_flush_queue_time | 0 |
| binlog_order_commits | ON |
| binlog_rotate_encryption_master_key_at_startup | OFF |
| binlog_row_event_max_size | 8192 |
| binlog_row_image | FULL |
| binlog_row_metadata | MINIMAL |
| binlog_row_value_options | |
| binlog_rows_query_log_events | OFF |
| binlog_stmt_cache_size | 32768 |
| binlog_transaction_compression | OFF |
| binlog_transaction_compression_level_zstd | 3 |
| binlog_transaction_dependency_history_size | 25000 |
| binlog_transaction_dependency_tracking | COMMIT_ORDER |
+------------------------------------------------+--------------+
24 rows in set (0.00 sec)
mysql> perge binary logs before '2026-05-20 00:00:00';
ERROR 1064 (42000): You have an error in your SQL syntax; check the manual that corresponds to your MySQL server version for the right syntax to use near 'perge binary logs before '2026-05-20 00:00:00'' at line 1
mysql> purge binary logs before '2026-05-20 00:00:00';
Query OK, 0 rows affected (0.12 sec)
mysql> show binary logs;
+---------------+------------+-----------+
| Log_name | File_size | Encrypted |
+---------------+------------+-----------+
| binlog.000438 | 618166201 | No |
| binlog.000439 | 1075233776 | No |
| binlog.000440 | 1076237754 | No |
| binlog.000441 | 1074276162 | No |
| binlog.000442 | 234276939 | No |
+---------------+------------+-----------+
5 rows in set (0.00 sec)
mysql> purge binary logs before '2026-05-21 00:00:00';
Query OK, 0 rows affected, 1 warning (0.05 sec)
mysql> show binary logs;
+---------------+-----------+-----------+
| Log_name | File_size | Encrypted |
+---------------+-----------+-----------+
| binlog.000442 | 234276939 | No |
+---------------+-----------+-----------+
1 row in set (0.00 sec)
mysql>