久しぶりにOrange Pi PC2に電源を入れたらOSが起動しなかった….
microSDに最新のarmbianを入れてGUIを表示させてみると日本語が文字化けしている。
以前、Ubuntuベースのメール統合環境アプライアンスZentyalのコンソール表示文字化けを直す際に調べた「Zentyalを日本語で使う場合の設定手順」が流用できるかなと試してみる・・・
osakanataro@orangepipc2:~$ sudo apt install fonts-arphic-uming fonts-takao-pgothic
[sudo] osakanataro のパスワード:
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
E: パッケージ fonts-takao-pgothic が見つかりません
osakanataro@orangepipc2:~$
fonts-takao-pgothicがないらしいので、fonts-arphic-umingだけで再チャレンジ
osakanataro@orangepipc2:~$ sudo apt install fonts-arphic-uming
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
以下のパッケージが新たにインストールされます:
fonts-arphic-uming
アップグレード: 0 個、新規インストール: 1 個、削除: 0 個、保留: 0 個。
7,940 kB のアーカイブを取得する必要があります。
この操作後に追加で 21.5 MB のディスク容量が消費されます。
取得:1 http://cdn-fastly.deb.debian.org/debian buster/main arm64 fonts-arphic-uming all 0.2.20080216.2-10 [7,940 kB]
7,940 kB を 7秒 で取得しました (1,142 kB/s)
以前に未選択のパッケージ fonts-arphic-uming を選択しています。
(データベースを読み込んでいます ... 現在 111309 個のファイルとディレクトリがインストールされています。)
.../fonts-arphic-uming_0.2.20080216.2-10_all.deb を展開する準備をしています ...
fonts-arphic-uming (0.2.20080216.2-10) を展開しています...
fonts-arphic-uming (0.2.20080216.2-10) を設定しています ...
fontconfig (2.13.1-2) のトリガを処理しています ...
osakanataro@orangepipc2:~$
ブラウザを起動してみると無事表示
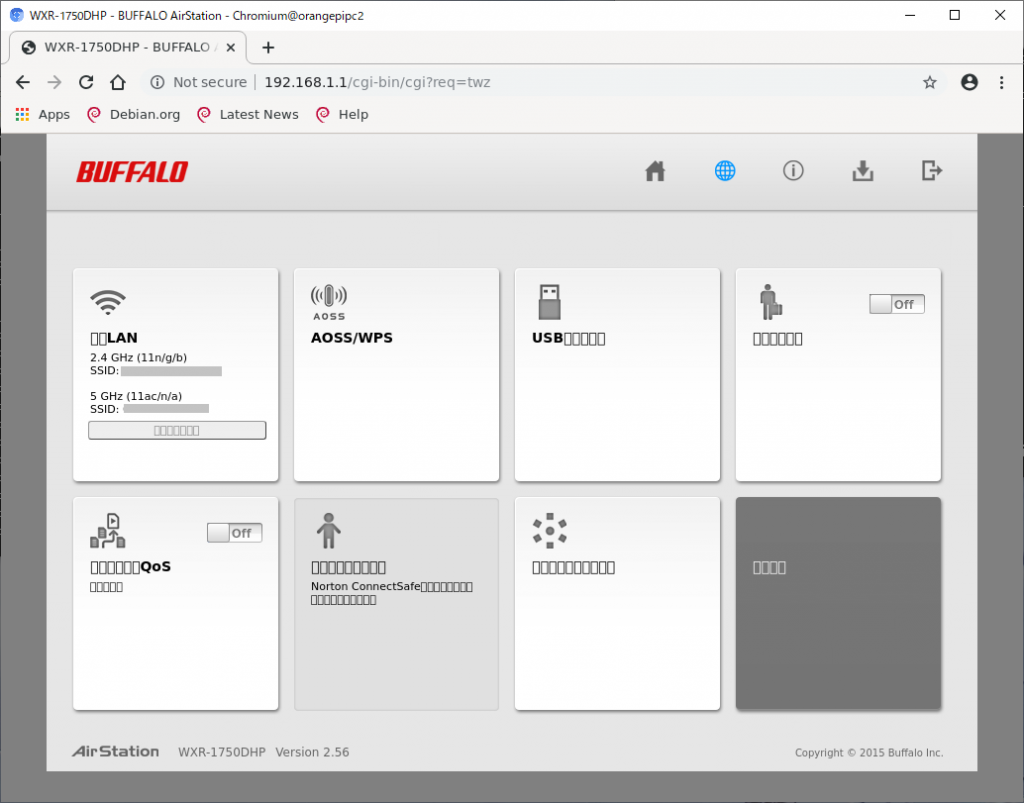
かと思ったら、起動直後の画面とかでちらほら文字化けが..
「apt search fonts-」で探してみると、fonts-takao, fonts-takao-gothic, fonts-takao-mincho があったので「 fonts-takao-gothic 」をインストールしてみることに
osakanataro@orangepipc2:~$ sudo apt install fonts-takao-gothic
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
以下のパッケージが新たにインストールされます:
fonts-takao-gothic
アップグレード: 0 個、新規インストール: 1 個、削除: 0 個、保留: 0 個。
3,523 kB のアーカイブを取得する必要があります。
この操作後に追加で 12.5 MB のディスク容量が消費されます。
取得:1 http://cdn-fastly.deb.debian.org/debian buster/main arm64 fonts-takao-gothic all 00303.01-2 [3,523 kB]
3,523 kB を 2秒 で取得しました (1,551 kB/s)
以前に未選択のパッケージ fonts-takao-gothic を選択しています。
(データベースを読み込んでいます ... 現在 111344 個のファイルとディレクトリがインストールされています。)
.../fonts-takao-gothic_00303.01-2_all.deb を展開する準備をしています ...
fonts-takao-gothic (00303.01-2) を展開しています...
fonts-takao-gothic (00303.01-2) を設定しています ...
update-alternatives: /usr/share/fonts/truetype/fonts-japanese-gothic.ttf (fonts-japanese-gothic.ttf) を提供するために自動モードで /usr/share/fonts/truetype/takao-gothic/TakaoPGothic.ttf を使います
fontconfig (2.13.1-2) のトリガを処理しています ...
osakanataro@orangepipc2:~$
出力結果を見ると、TakaoPGothic.ttf が含まれているようなので、おそらくパッケージ名が変わったのだろう、ということに…
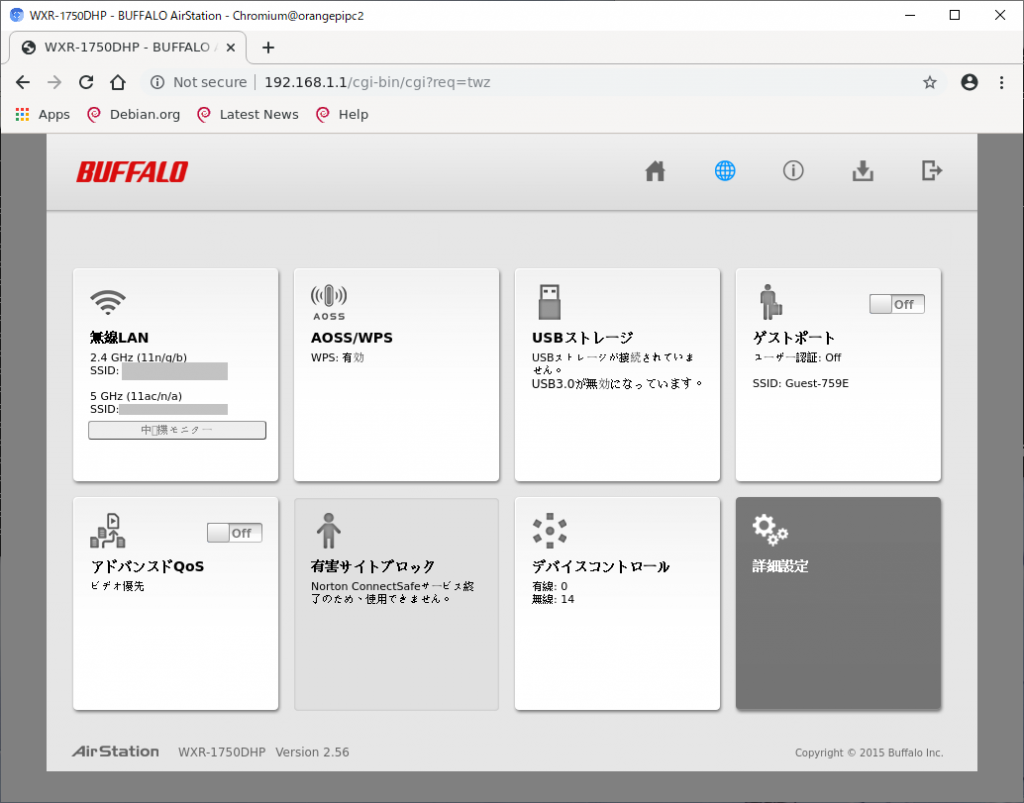
ブラウザを起動してみると期待通りの表示が
ルータ設定画面の表示も不自然さが減少した感じです。