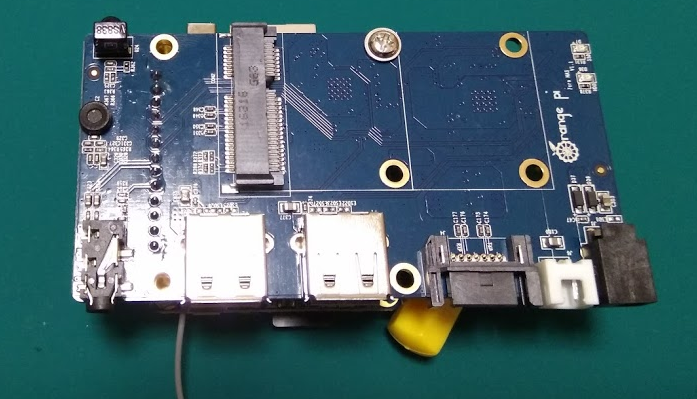
Allwinner H2+搭載のスモールボードコンピュータOrange Pi Zeroに、SATAコネクタとmSATAコネクタ、USBポート*2、オーディオ端子、赤外線端子を増設するNAS拡張ボードを買ってみました。
Orange Pi Zero メモリ256MBモデル「Orange Pi Zero H2 Quad Core Open-source 256MB development board beyond Raspberry Pi」$6.99+送料$3.11
Orange Pi Zero メモリ512MBモデル「New Orange Pi Zero H2 Quad Core Open-source 512MB development board beyond Raspberry Pi」$8.99 +送料$3.11
Orange Pi Zero NAS拡張ボード「Orange Pi Zero NAS Expansion board Interface board Development board beyond Raspberry Pi」$6.98+送料$2.95
このNAS拡張ボードは、Orange Pi Zeroの13ピンコネクタに出てる端子全てにコネクタをつけた+USB経由でSATAを接続する、というものです。
USB経由で接続しているため、SATAの速度は期待できない感じのものになります。
そう考えると、SATA経由でディスクを繋ぐような用途だと、直接SATAチップを制御している上位機種の「Orange Pi Plus(RAM1GB) $39.00+送料$3.41」か「Orange Pi Plus2(RAM2GB) $49.00+送料$3.00」を選択した方がいいのでは?という考えもあります。
うちの場合は、つい気の迷いで買ってしまったけど、使い道がなく眠ってるOrange Pi Zero 256MBが活用できないか?ということで買ってみました。
1/20発注で、1/28に到着、と旧正月に巻き込まれる前に発送され、到着したような感じですね。
届いたものはOrange Piのでかい方の共通箱に入ったNAS拡張ボードと、ネジセット

取り付けの為に並べてるとと・・・
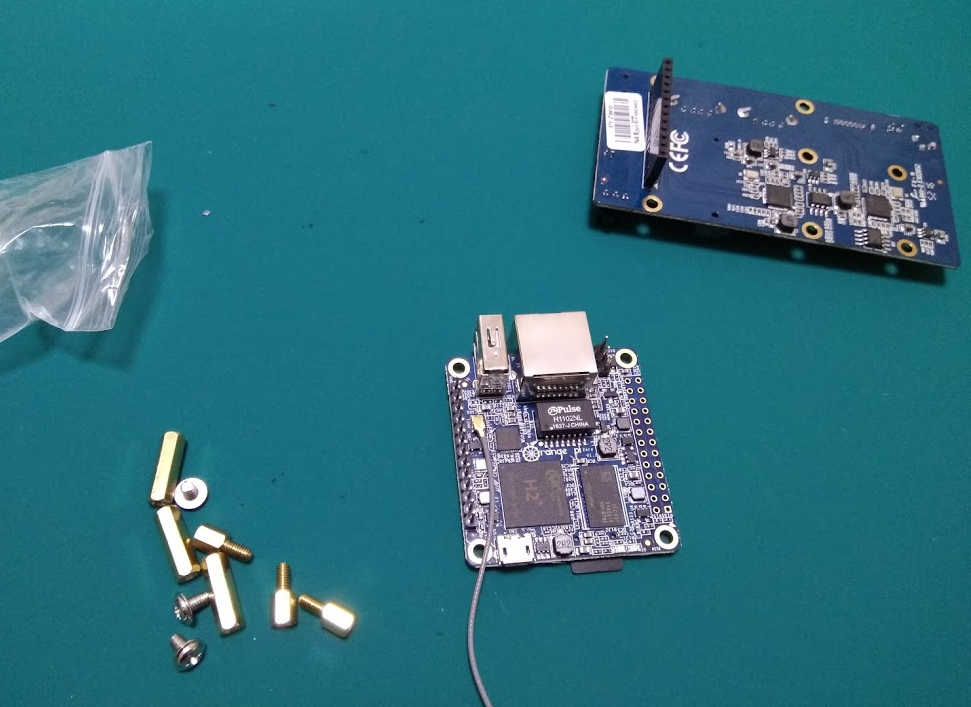
ネジが3セットしかない・・・
3本をどう使うか・・・
mSATAのボードを止めるための穴と被る

添付のネジだと他の部品に当たる
どうするのが正解なのか・・・
まぁ、とりあえず電源ON

NAS拡張ボード側の電源コネクタ(EIAJ#2/PSPと同じ形状)に給電するだけで、Orange Pi Zero側にも給電されました。
で・・・ココで発注漏れが発覚。
NAS拡張ボード上の電源コネクタからSATA接続の電源をとることができるSATAケーブルの発注を忘れていました。
「SATA Line for Orange Pi not for Raspberry」$3.89+送料$2.38

これが無くても、別途電源を供給すればいいだけなんですが、コンパクトに収めようとすると必要なものですね。
現在、Orange Pi Plus2で使ってるケーブルと同じなので、機会をみて、テストしたいと思います
まずは、NAS拡張ボードだけの認識状況チェック
「armbian」をLegacy 3.4.113の最新版にして起動。
(Mainline 4.9.4の方は、まだ開発中です。「Mainline」というのはLinux kernelの標準提供版を元にしている、という意味合いです。)
Orange Pi ZeroのオンボードUSBコネクタにSDカードリーダをつけた場合
root@orangepizero:~# lsusb Bus 008 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 007 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 006 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 005 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 004 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 002 Device 002: ID 1976:1307 Chipsbrand Microelectronics (HK) Co., Ltd. Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub root@orangepizero:~#
NAS拡張ボードのオーディオ端子側のUSBコネクタにSDカードリーダをつけた場合
root@orangepizero:~# lsusb Bus 008 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 007 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 006 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 005 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 004 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 003 Device 002: ID 1976:1307 Chipsbrand Microelectronics (HK) Co., Ltd. Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub root@orangepizero:~#
NAS拡張ボードのSATA端子側のUSBコネクタにSDカードリーダをつけた場合
root@orangepizero:~# lsusb Bus 008 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 007 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 006 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 005 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub Bus 004 Device 002: ID 1976:1307 Chipsbrand Microelectronics (HK) Co., Ltd. Bus 004 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub root@orangepizero:~#
USB機器を繋がず、lsusb -vをした結果
root@orangepizero:~# lsusb -v
Bus 008 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 1.10
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0001 1.1 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ohci_hcd
iProduct 2 SW USB2.0 'Open' Host Controller (OHCI) Driver
iSerial 1 sunxi-ohci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0002 1x 2 bytes
bInterval 255
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x0012
No power switching (usb 1.0)
No overcurrent protection
bPwrOn2PwrGood 2 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
Bus 007 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 1.10
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0001 1.1 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ohci_hcd
iProduct 2 SW USB2.0 'Open' Host Controller (OHCI) Driver
iSerial 1 sunxi-ohci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0002 1x 2 bytes
bInterval 255
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x0012
No power switching (usb 1.0)
No overcurrent protection
bPwrOn2PwrGood 2 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
Bus 006 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 1.10
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0001 1.1 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ohci_hcd
iProduct 2 SW USB2.0 'Open' Host Controller (OHCI) Driver
iSerial 1 sunxi-ohci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0002 1x 2 bytes
bInterval 255
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x0012
No power switching (usb 1.0)
No overcurrent protection
bPwrOn2PwrGood 2 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
Bus 005 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 1.10
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0001 1.1 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ohci_hcd
iProduct 2 SW USB2.0 'Open' Host Controller (OHCI) Driver
iSerial 1 sunxi-ohci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0002 1x 2 bytes
bInterval 255
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x0012
No power switching (usb 1.0)
No overcurrent protection
bPwrOn2PwrGood 2 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
Bus 004 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 2.00
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0002 2.0 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ehci_hcd
iProduct 2 SW USB2.0 'Enhanced' Host Controller (EHCI) Driver
iSerial 1 sunxi-ehci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0004 1x 4 bytes
bInterval 12
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x000a
No power switching (usb 1.0)
Per-port overcurrent protection
bPwrOn2PwrGood 10 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 2.00
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0002 2.0 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ehci_hcd
iProduct 2 SW USB2.0 'Enhanced' Host Controller (EHCI) Driver
iSerial 1 sunxi-ehci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0004 1x 4 bytes
bInterval 12
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x000a
No power switching (usb 1.0)
Per-port overcurrent protection
bPwrOn2PwrGood 10 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 2.00
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0002 2.0 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ehci_hcd
iProduct 2 SW USB2.0 'Enhanced' Host Controller (EHCI) Driver
iSerial 1 sunxi-ehci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0004 1x 4 bytes
bInterval 12
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x000a
No power switching (usb 1.0)
Per-port overcurrent protection
bPwrOn2PwrGood 10 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Device Descriptor:
bLength 18
bDescriptorType 1
bcdUSB 2.00
bDeviceClass 9 Hub
bDeviceSubClass 0 Unused
bDeviceProtocol 0 Full speed (or root) hub
bMaxPacketSize0 64
idVendor 0x1d6b Linux Foundation
idProduct 0x0002 2.0 root hub
bcdDevice 3.04
iManufacturer 3 Linux 3.4.113-sun8i ehci_hcd
iProduct 2 SW USB2.0 'Enhanced' Host Controller (EHCI) Driver
iSerial 1 sunxi-ehci
bNumConfigurations 1
Configuration Descriptor:
bLength 9
bDescriptorType 2
wTotalLength 25
bNumInterfaces 1
bConfigurationValue 1
iConfiguration 0
bmAttributes 0xe0
Self Powered
Remote Wakeup
MaxPower 0mA
Interface Descriptor:
bLength 9
bDescriptorType 4
bInterfaceNumber 0
bAlternateSetting 0
bNumEndpoints 1
bInterfaceClass 9 Hub
bInterfaceSubClass 0 Unused
bInterfaceProtocol 0 Full speed (or root) hub
iInterface 0
Endpoint Descriptor:
bLength 7
bDescriptorType 5
bEndpointAddress 0x81 EP 1 IN
bmAttributes 3
Transfer Type Interrupt
Synch Type None
Usage Type Data
wMaxPacketSize 0x0004 1x 4 bytes
bInterval 12
Hub Descriptor:
bLength 9
bDescriptorType 41
nNbrPorts 1
wHubCharacteristic 0x000a
No power switching (usb 1.0)
Per-port overcurrent protection
bPwrOn2PwrGood 10 * 2 milli seconds
bHubContrCurrent 0 milli Ampere
DeviceRemovable 0x00
PortPwrCtrlMask 0xff
Hub Port Status:
Port 1: 0000.0100 power
Device Status: 0x0001
Self Powered
root@orangepizero:~#
そしてdmesgの結果。
root@orangepizero:~# dmesg [ 0.000000] Booting Linux on physical CPU 0 [ 0.000000] Initializing cgroup subsys cpuset [ 0.000000] Initializing cgroup subsys cpu [ 0.000000] Linux version 3.4.113-sun8i (root@xenial) (gcc version 5.4.0 20160609 (Ubuntu/Linaro 5.4.0-6ubuntu1~16.04.1) ) #309 SMP PREEMPT Wed Nov 9 22:05:23 CET 2016 [ 0.000000] CPU: ARMv7 Processor [410fc075] revision 5 (ARMv7), cr=10c5387d [ 0.000000] CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache [ 0.000000] Machine: sun8i [ 0.000000] cma: CMA: reserved 160 MiB at 46000000 [ 0.000000] Memory policy: ECC disabled, Data cache writealloc [ 0.000000] On node 0 totalpages: 65536 [ 0.000000] free_area_init_node: node 0, pgdat c0a19740, node_mem_map c0b53000 [ 0.000000] Normal zone: 576 pages used for memmap [ 0.000000] Normal zone: 0 pages reserved [ 0.000000] Normal zone: 64960 pages, LIFO batch:15 [ 0.000000] script_init enter! [ 0.000000] script_init exit! [ 0.000000] PERCPU: Embedded 8 pages/cpu @c0da4000 s11968 r8192 d12608 u32768 [ 0.000000] pcpu-alloc: s11968 r8192 d12608 u32768 alloc=8*4096 [ 0.000000] pcpu-alloc: [0] 0 [0] 1 [0] 2 [0] 3 [ 0.000000] Built 1 zonelists in Zone order, mobility grouping on. Total pages: 64960 [ 0.000000] Kernel command line: root=UUID=1ba508cc-2c06-4663-a8f0-25804aac8e6b rootwait rootfstype=ext4 console=tty1 console=ttyS0,115200 cgroup_enable=memory swapaccount=1 hdmi.audio=EDID:0 disp.screen0_output_mode=1920x1080p60 panic=10 consoleblank=0 enforcing=0 loglevel=1 ubootpart=a725c3d4-01 sunxi_ve_mem_reserve=0 sunxi_g2d_mem_reserve=0 sunxi_fb_mem_reserve=16 [ 0.000000] PID hash table entries: 1024 (order: 0, 4096 bytes) [ 0.000000] Dentry cache hash table entries: 32768 (order: 5, 131072 bytes) [ 0.000000] Inode-cache hash table entries: 16384 (order: 4, 65536 bytes) [ 0.000000] allocated 524288 bytes of page_cgroup [ 0.000000] please try 'cgroup_disable=memory' option if you don't want memory cgroups [ 0.000000] Memory: 256MB = 256MB total [ 0.000000] Memory: 78528k/78528k available, 183616k reserved, 0K highmem [ 0.000000] Virtual kernel memory layout: [ 0.000000] vector : 0xffff0000 - 0xffff1000 ( 4 kB) [ 0.000000] fixmap : 0xfff00000 - 0xfffe0000 ( 896 kB) [ 0.000000] vmalloc : 0xd0800000 - 0xff000000 ( 744 MB) [ 0.000000] lowmem : 0xc0000000 - 0xd0000000 ( 256 MB) [ 0.000000] pkmap : 0xbfe00000 - 0xc0000000 ( 2 MB) [ 0.000000] modules : 0xbf000000 - 0xbfe00000 ( 14 MB) [ 0.000000] .text : 0xc0008000 - 0xc095c7ac (9554 kB) [ 0.000000] .init : 0xc095d000 - 0xc09adec0 ( 324 kB) [ 0.000000] .data : 0xc09ae000 - 0xc0a1e590 ( 450 kB) [ 0.000000] .bss : 0xc0a1ed44 - 0xc0b52090 (1229 kB) [ 0.000000] Preemptible hierarchical RCU implementation. [ 0.000000] Additional per-CPU info printed with stalls. [ 0.000000] NR_IRQS:544 [ 0.000000] Architected local timer running at 24.00MHz. [ 0.000000] Switching to timer-based delay loop [ 0.000000] sched_clock: 32 bits at 24MHz, resolution 41ns, wraps every 178956ms [ 0.000000] Console: colour dummy device 80x30 [ 0.000000] console [tty1] enabled [ 0.000482] Calibrating delay loop (skipped), value calculated using timer frequency.. 4800.00 BogoMIPS (lpj=24000000) [ 0.000536] pid_max: default: 32768 minimum: 301 [ 0.001211] Mount-cache hash table entries: 512 [ 0.003147] Initializing cgroup subsys cpuacct [ 0.003179] Initializing cgroup subsys memory [ 0.003271] Initializing cgroup subsys devices [ 0.003296] Initializing cgroup subsys freezer [ 0.003318] Initializing cgroup subsys blkio [ 0.003366] Initializing cgroup subsys perf_event [ 0.003526] CPU: Testing write buffer coherency: ok [ 0.003623] ftrace: allocating 25775 entries in 76 pages [ 0.060510] CPU0: thread -1, cpu 0, socket 0, mpidr 80000000 [ 0.060543] [sunxi_smp_prepare_cpus] enter [ 0.060614] Setting up static identity map for 0x406944b8 - 0x40694510 [ 0.062460] CPU1: Booted secondary processor [ 0.062460] CPU1: thread -1, cpu 1, socket 0, mpidr 80000001 [ 0.070394] CPU2: Booted secondary processor [ 0.070394] CPU2: thread -1, cpu 2, socket 0, mpidr 80000002 [ 0.070917] CPU3: Booted secondary processor [ 0.070917] CPU3: thread -1, cpu 3, socket 0, mpidr 80000003 [ 0.080334] Brought up 4 CPUs [ 0.080367] SMP: Total of 4 processors activated (19200.00 BogoMIPS). [ 0.081762] devtmpfs: initialized [ 0.095862] wakeup src cnt is : 2. [ 0.095887] [exstandby]leave extended_standby_enable_wakeup_src : event 0x800000 [ 0.095910] [exstandby]leave extended_standby_enable_wakeup_src : wakeup_gpio_map 0x0 [ 0.095933] [exstandby]leave extended_standby_enable_wakeup_src : wakeup_gpio_group 0x40 [ 0.095956] [exstandby]leave extended_standby_enable_wakeup_src : event 0x800000 [ 0.095978] [exstandby]leave extended_standby_enable_wakeup_src : wakeup_gpio_map 0x8 [ 0.096000] [exstandby]leave extended_standby_enable_wakeup_src : wakeup_gpio_group 0x40 [ 0.096024] sunxi pm init [ 0.096295] pinctrl core: initialized pinctrl subsystem [ 0.109020] NET: Registered protocol family 16 [ 0.113058] DMA: preallocated 2048 KiB pool for atomic coherent allocations [ 0.113193] script_sysfs_init success [ 0.113252] sunxi_dump_init success [ 0.115017] gpiochip_add: registered GPIOs 0 to 383 on device: sunxi-pinctrl [ 0.117393] sunxi-pinctrl sunxi-pinctrl: initialized sunXi PIO driver [ 0.117393] plat: add bmp085 device [ 0.117393] plat: add pcf8591 device [ 0.117393] hw-breakpoint: found 5 (+1 reserved) breakpoint and 4 watchpoint registers. [ 0.117393] hw-breakpoint: maximum watchpoint size is 8 bytes. [ 0.117393] script config pll_video to 297 Mhz [ 0.117393] script config pll_de to 864 Mhz [ 0.117393] script config pll_ve to 402 Mhz [ 0.117393] sunxi_default_clk_init [ 0.117393] try to set pll6ahb1 to 200000000 [ 0.117393] try to set ahb clk source to pll6ahb1 [ 0.117393] set ahb clk source to pll6ahb1 [ 0.117393] try to set ahb1 to 200000000 [ 0.117393] try to set apb1 to 100000000 [ 0.130455] bio: create slab <bio-0> at 0 [ 0.130629] [ARISC] :sunxi-arisc driver v1.04 [ 0.148561] [ARISC] :arisc version: [v0.1.58] [ 0.257596] [ARISC] :sunxi-arisc driver v1.04 startup succeeded [ 0.260913] SCSI subsystem initialized [ 0.261317] usbcore: registered new interface driver usbfs [ 0.261470] usbcore: registered new interface driver hub [ 0.261522] usbcore: registered new device driver usb [ 0.261522] twi_chan_cfg()340 - [twi0] has no twi_regulator. [ 0.261522] twi_chan_cfg()340 - [twi1] has no twi_regulator. [ 0.261522] twi_chan_cfg()340 - [twi2] has no twi_regulator. [ 0.261814] Linux video capture interface: v2.00 [ 0.262297] Advanced Linux Sound Architecture Driver Version 1.0.25. [ 0.263765] cfg80211: Calling CRDA to update world regulatory domain [ 0.271151] Switching to clocksource arch_sys_counter [ 0.297806] FS-Cache: Loaded [ 0.298339] CacheFiles: Loaded [ 0.321594] NET: Registered protocol family 2 [ 0.345297] IP route cache hash table entries: 2048 (order: 1, 8192 bytes) [ 0.346360] TCP established hash table entries: 8192 (order: 4, 65536 bytes) [ 0.346642] TCP bind hash table entries: 8192 (order: 4, 98304 bytes) [ 0.346944] TCP: Hash tables configured (established 8192 bind 8192) [ 0.346966] TCP: reno registered [ 0.346990] UDP hash table entries: 128 (order: 0, 4096 bytes) [ 0.347049] UDP-Lite hash table entries: 128 (order: 0, 4096 bytes) [ 0.347714] NET: Registered protocol family 1 [ 0.348496] RPC: Registered named UNIX socket transport module. [ 0.348521] RPC: Registered udp transport module. [ 0.348539] RPC: Registered tcp transport module. [ 0.348556] RPC: Registered tcp NFSv4.1 backchannel transport module. [ 0.348911] Trying to unpack rootfs image as initramfs... [ 0.918121] Freeing initrd memory: 4380K [ 0.919303] hw perfevents: enabled with ARMv7 Cortex_A7 PMU driver, 5 counters available [ 0.919542] sunxi_reg_init enter [ 0.921375] audit: initializing netlink socket (disabled) [ 0.921462] type=2000 audit(0.920:1): initialized [ 0.925193] squashfs: version 4.0 (2009/01/31) Phillip Lougher [ 0.925539] misc fatfs initialized [ 0.927013] NFS: Registering the id_resolver key type [ 0.927789] nfs4filelayout_init: NFSv4 File Layout Driver Registering... [ 0.927817] Installing knfsd (copyright (C) 1996 okir@monad.swb.de). [ 0.929313] NTFS driver 2.1.30 [Flags: R/W]. [ 0.929957] fuse init (API version 7.18) [ 0.931524] Btrfs loaded [ 0.931573] msgmni has been set to 481 [ 0.934482] Block layer SCSI generic (bsg) driver version 0.4 loaded (major 253) [ 0.934523] io scheduler noop registered [ 0.934541] io scheduler deadline registered [ 0.934677] io scheduler cfq registered (default) [ 0.935476] [DISP]disp_module_init [ 0.936066] cmdline,init_disp= [ 0.936128] cmdline,disp= [ 0.944593] [DISP] Fb_map_kernel_logo,line:932:Fb_map_kernel_logo failed! [ 0.960721] Console: switching to colour frame buffer device 90x36 [ 0.978904] [DISP]disp_module_init finish [ 0.979337] sw_uart_get_devinfo()1503 - uart0 has no uart_regulator. [ 0.979370] sw_uart_get_devinfo()1503 - uart1 has no uart_regulator. [ 0.979399] sw_uart_get_devinfo()1503 - uart2 has no uart_regulator. [ 0.980574] uart0: ttyS0 at MMIO 0x1c28000 (irq = 32) is a SUNXI [ 0.980602] sw_uart_pm()890 - uart0 clk is already enable [ 0.980638] sw_console_setup()1233 - console setup baud 115200 parity n bits 8, flow n [ 0.980906] console [ttyS0] enabled [ 0.981573] uart1: ttyS1 at MMIO 0x1c28400 (irq = 33) is a SUNXI [ 0.982086] uart2: ttyS2 at MMIO 0x1c28800 (irq = 34) is a SUNXI [ 0.983186] sunxi_cmatest_init enter [ 0.983265] sunxi_cmatest_init success [ 0.991660] brd: module loaded [ 0.999800] loop: module loaded [ 1.000401] sunxi_spi_chan_cfg()1376 - [spi-0] has no spi_regulator. [ 1.000431] sunxi_spi_chan_cfg()1376 - [spi-1] has no spi_regulator. [ 1.001536] spi spi0: master is unqueued, this is deprecated [ 1.002211] tun: Universal TUN/TAP device driver, 1.6 [ 1.002233] tun: (C) 1999-2004 Max Krasnyansky <maxk@qualcomm.com> [ 1.003960] PPP generic driver version 2.4.2 [ 1.004298] PPP BSD Compression module registered [ 1.004319] PPP Deflate Compression module registered [ 1.009066] PPP MPPE Compression module registered [ 1.009099] NET: Registered protocol family 24 [ 1.009233] ehci_hcd: USB 2.0 'Enhanced' Host Controller (EHCI) Driver [ 1.029418] sunxi-ehci sunxi-ehci.1: SW USB2.0 'Enhanced' Host Controller (EHCI) Driver [ 1.029491] sunxi-ehci sunxi-ehci.1: new USB bus registered, assigned bus number 1 [ 1.030544] sunxi-ehci sunxi-ehci.1: irq 104, io mem 0xf1c1a000 [ 1.050068] sunxi-ehci sunxi-ehci.1: USB 0.0 started, EHCI 1.00 [ 1.051287] hub 1-0:1.0: USB hub found [ 1.051335] hub 1-0:1.0: 1 port detected [ 1.072091] sunxi-ehci sunxi-ehci.2: SW USB2.0 'Enhanced' Host Controller (EHCI) Driver [ 1.072154] sunxi-ehci sunxi-ehci.2: new USB bus registered, assigned bus number 2 [ 1.072941] sunxi-ehci sunxi-ehci.2: irq 106, io mem 0xf1c1b000 [ 1.090070] sunxi-ehci sunxi-ehci.2: USB 0.0 started, EHCI 1.00 [ 1.091182] hub 2-0:1.0: USB hub found [ 1.091237] hub 2-0:1.0: 1 port detected [ 1.111986] sunxi-ehci sunxi-ehci.3: SW USB2.0 'Enhanced' Host Controller (EHCI) Driver [ 1.112048] sunxi-ehci sunxi-ehci.3: new USB bus registered, assigned bus number 3 [ 1.112837] sunxi-ehci sunxi-ehci.3: irq 108, io mem 0xf1c1c000 [ 1.130071] sunxi-ehci sunxi-ehci.3: USB 0.0 started, EHCI 1.00 [ 1.131124] hub 3-0:1.0: USB hub found [ 1.131174] hub 3-0:1.0: 1 port detected [ 1.151909] sunxi-ehci sunxi-ehci.4: SW USB2.0 'Enhanced' Host Controller (EHCI) Driver [ 1.151969] sunxi-ehci sunxi-ehci.4: new USB bus registered, assigned bus number 4 [ 1.152730] sunxi-ehci sunxi-ehci.4: irq 110, io mem 0xf1c1d000 [ 1.170062] sunxi-ehci sunxi-ehci.4: USB 0.0 started, EHCI 1.00 [ 1.171140] hub 4-0:1.0: USB hub found [ 1.171188] hub 4-0:1.0: 1 port detected [ 1.171964] ohci_hcd: USB 1.1 'Open' Host Controller (OHCI) Driver [ 1.192128] sunxi-ohci sunxi-ohci.1: SW USB2.0 'Open' Host Controller (OHCI) Driver [ 1.192190] sunxi-ohci sunxi-ohci.1: new USB bus registered, assigned bus number 5 [ 1.192256] sunxi-ohci sunxi-ohci.1: irq 105, io mem 0xf1c1a400 [ 1.255135] hub 5-0:1.0: USB hub found [ 1.255176] hub 5-0:1.0: 1 port detected [ 1.275975] sunxi-ohci sunxi-ohci.2: SW USB2.0 'Open' Host Controller (OHCI) Driver [ 1.276038] sunxi-ohci sunxi-ohci.2: new USB bus registered, assigned bus number 6 [ 1.276104] sunxi-ohci sunxi-ohci.2: irq 107, io mem 0xf1c1b400 [ 1.335172] hub 6-0:1.0: USB hub found [ 1.335219] hub 6-0:1.0: 1 port detected [ 1.356004] sunxi-ohci sunxi-ohci.3: SW USB2.0 'Open' Host Controller (OHCI) Driver [ 1.356064] sunxi-ohci sunxi-ohci.3: new USB bus registered, assigned bus number 7 [ 1.356128] sunxi-ohci sunxi-ohci.3: irq 109, io mem 0xf1c1c400 [ 1.415089] hub 7-0:1.0: USB hub found [ 1.415130] hub 7-0:1.0: 1 port detected [ 1.435831] sunxi-ohci sunxi-ohci.4: SW USB2.0 'Open' Host Controller (OHCI) Driver [ 1.435891] sunxi-ohci sunxi-ohci.4: new USB bus registered, assigned bus number 8 [ 1.435958] sunxi-ohci sunxi-ohci.4: irq 111, io mem 0xf1c1d400 [ 1.495035] hub 8-0:1.0: USB hub found [ 1.495073] hub 8-0:1.0: 1 port detected [ 1.495781] Initializing USB Mass Storage driver... [ 1.496244] usbcore: registered new interface driver usb-storage [ 1.496267] USB Mass Storage support registered. [ 1.496383] usbcore: registered new interface driver ums-alauda [ 1.496502] usbcore: registered new interface driver ums-cypress [ 1.496623] usbcore: registered new interface driver ums-datafab [ 1.496719] usbcore: registered new interface driver ums_eneub6250 [ 1.496818] usbcore: registered new interface driver ums-freecom [ 1.496918] usbcore: registered new interface driver ums-isd200 [ 1.497016] usbcore: registered new interface driver ums-jumpshot [ 1.497110] usbcore: registered new interface driver ums-karma [ 1.497207] usbcore: registered new interface driver ums-onetouch [ 1.497332] usbcore: registered new interface driver ums-realtek [ 1.497434] usbcore: registered new interface driver ums-sddr09 [ 1.497535] usbcore: registered new interface driver ums-sddr55 [ 1.497634] usbcore: registered new interface driver ums-usbat [ 1.498101] uinput result 0 , vmouse_init [ 1.499304] mousedev: PS/2 mouse device common for all mice [ 1.499767] sunxikbd_init failed. [ 1.499791] sunxikbd_init failed. [ 1.499814] ls_fetch_sysconfig_para: ls_unused. [ 1.499832] ltr_init: ls_fetch_sysconfig_para err. [ 1.500482] [RTC] WARNING: Rtc time will be wrong!! [ 1.500503] [RTC] WARNING: use *internal OSC* as clock source [ 1.501019] sunxi-rtc sunxi-rtc: rtc core: registered sunxi-rtc as rtc0 [ 1.501118] i2c /dev entries driver [ 1.501911] sunxi cedar version 0.1 [ 1.501995] [cedar]: install start!!! [ 1.502389] [cedar]: install end!!! [ 1.502743] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x18) [ 1.502958] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x19) [ 1.503160] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x1a) [ 1.503360] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x29) [ 1.503559] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x2a) [ 1.503762] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x2b) [ 1.503962] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x4c) [ 1.504183] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x4d) [ 1.504399] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x4e) [ 1.504642] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x18) [ 1.504877] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x19) [ 1.505111] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x1a) [ 1.505346] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x29) [ 1.505581] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x2a) [ 1.505816] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x2b) [ 1.506050] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x4c) [ 1.506284] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x4d) [ 1.506518] sunxi_i2c_do_xfer()985 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x4e) [ 1.506550] sunxi_wdt_init_module: sunxi WatchDog Timer Driver v1.0 [ 1.506891] sunxi_wdt_probe: devm_ioremap return wdt_reg 0xf1c20ca0, res->start 0x01c20ca0, res->end 0x01c20cbf [ 1.507189] sunxi_wdt_probe: initialized (g_timeout=16s, g_nowayout=0) [ 1.507215] wdt_enable, write reg 0xf1c20cb8 val 0x00000000 [ 1.507237] timeout_to_interv, line 167 [ 1.507254] interv_to_timeout, line 189 [ 1.507274] wdt_set_tmout, write 0x000000b0 to mode reg 0xf1c20cb8, actual timeout 16 sec [ 1.508111] device-mapper: ioctl: 4.22.0-ioctl (2011-10-19) initialised: dm-devel@redhat.com [ 1.508511] calibrat: max_cpufreq 1200Mhz Type 0! [ 1.508538] [cpu_freq] ERR:get cpu extremity frequency from sysconfig failed, use max_freq [ 1.509147] [mmc]: SD/MMC/SDIO Host Controller Driver(v1.111 2015-4-13 15:24) Compiled in Nov 9 2016 at 22:04:14 [ 1.509215] [mmc]: get mmc0's sdc_power is null! [ 1.509272] [mmc]: get mmc1's sdc_power is null! [ 1.509292] [mmc]: get mmc1's 2xmode ok, val = 1 [ 1.509312] [mmc]: get mmc1's ddrmode ok, val = 1 [ 1.509344] [mmc]: MMC host used card: 0x3, boot card: 0x0, io_card 2 [ 1.513921] [mmc]: sdc0 power_supply is null [ 1.516659] no blue_led, ignore it! [ 1.517125] Registered led device: red_led [ 1.517357] Registered led device: green_led [ 1.517389] no led_0, ignore it! [ 1.517406] no led_1, ignore it! [ 1.517422] no led_2, ignore it! [ 1.517437] no led_3, ignore it! [ 1.517452] no led_4, ignore it! [ 1.517467] no led_5, ignore it! [ 1.517482] no led_6, ignore it! [ 1.517496] no led_7, ignore it! [ 1.519119] usbcore: registered new interface driver usbhid [ 1.519141] usbhid: USB HID core driver [ 1.527573] asoc: sndcodec <-> sunxi-codec mapping ok [ 1.529822] [DAUDIO]sunxi-daudio cannot find any using configuration for controllers, return directly! [ 1.530281] [I2S]snddaudio cannot find any using configuration for controllers, return directly! [ 1.530312] [DAUDIO0] driver not init,just return. [ 1.537349] asoc: sndhdmi <-> sunxi-hdmiaudio.0 mapping ok [ 1.539932] oprofile: using arm/armv7-ca7 [ 1.540354] u32 classifier [ 1.540374] Performance counters on [ 1.540391] input device check on [ 1.540405] Actions configured [ 1.540773] IPv4 over IPv4 tunneling driver [ 1.542043] TCP: bic registered [ 1.542066] TCP: cubic registered [ 1.542081] TCP: westwood registered [ 1.542097] TCP: highspeed registered [ 1.542113] TCP: hybla registered [ 1.542129] TCP: htcp registered [ 1.542144] TCP: vegas registered [ 1.542160] TCP: veno registered [ 1.542175] TCP: scalable registered [ 1.542191] TCP: lp registered [ 1.542206] TCP: yeah registered [ 1.542222] TCP: illinois registered [ 1.542237] Initializing XFRM netlink socket [ 1.542711] NET: Registered protocol family 10 [ 1.545031] NET: Registered protocol family 17 [ 1.545091] NET: Registered protocol family 15 [ 1.545179] Registering the dns_resolver key type [ 1.546250] VFP support v0.3: implementor 41 architecture 2 part 30 variant 7 rev 5 [ 1.546293] ThumbEE CPU extension supported. [ 1.546334] Registering SWP/SWPB emulation handler [ 1.547466] registered taskstats version 1 [ 1.548750] ths_fetch_sysconfig_para: type err device_used = 1. [ 1.551454] CPU Budget:corekeeper enabled [ 1.551997] CPU Budget:Register notifier [ 1.552021] CPU Budget:register Success [ 1.552047] sunxi-budget-cooling sunxi-budget-cooling: Cooling device registered: thermal-budget-0 [ 1.558416] [rf_pm]: Did not config module_power1 in sys_config [ 1.558448] [rf_pm]: Did not config module_power2 in sys_config [ 1.558470] [rf_pm]: Did not config module_power3 in sys_config [ 1.558491] [rf_pm]: mod has no chip_en gpio [ 1.558509] [rf_pm]: regulator on. [ 1.558539] [rf_pm]: set losc_out 32k out[wifi_pm]: set wl_reg_on 1 ! [ 1.584390] mmc0: new high speed SDHC card at address 1234 [ 1.585361] mmcblk0: mmc0:1234 SA16G 14.4 GiB [ 1.587439] mmcblk0: p1 [ 1.588524] mmcblk mmc0:1234: Card claimed for testing. [ 1.588554] mmc0:1234: SA16G 14.4 GiB [ 1.659158] [wifi_pm]: get wifi_sdc_id failed [ 1.660735] [mmc]: sdc1 power_supply is null [ 1.718620] mmc1: new high speed SDIO card at address 0001 [ 1.759230] [wifi_pm]: wifi gpio init is OK !! [ 1.759337] [rfkill]: init no bt used in configuration [ 1.759357] ALSA device list: [ 1.759372] #0: audiocodec [ 1.759387] #1: sndhdmi [ 1.761141] Freeing init memory: 320K [ 2.349521] vmouse_input_dev_open [ 2.380259] vmouse_input_dev_close [ 3.032533] EXT4-fs (mmcblk0p1): mounted filesystem with writeback data mode. Opts: (null) [ 3.659515] systemd[1]: System time before build time, advancing clock. [ 4.190542] systemd[1]: systemd 229 running in system mode. (+PAM +AUDIT +SELINUX +IMA +APPARMOR +SMACK +SYSVINIT +UTMP +LIBCRYPTSETUP +GCRYPT +GNUTLS +ACL +XZ -LZ4 +SECCOMP +BLKID +ELFUTILS +KMOD -IDN) [ 4.191161] systemd[1]: Detected architecture arm. [ 4.221840] systemd[1]: Set hostname to <orangepizero>. [ 4.842674] systemd[1]: Started Forward Password Requests to Wall Directory Watch. [ 4.860791] systemd[1]: Started Dispatch Password Requests to Console Directory Watch. [ 4.880558] systemd[1]: Listening on udev Kernel Socket. [ 4.900950] systemd[1]: Listening on Journal Audit Socket. [ 4.920334] systemd[1]: Reached target Remote File Systems (Pre). [ 4.940608] systemd[1]: Listening on Journal Socket (/dev/log). [ 4.961403] systemd[1]: Set up automount Arbitrary Executable File Formats File System Automount Point. [ 4.980662] systemd[1]: Listening on Journal Socket. [ 5.001158] systemd[1]: Created slice User and Session Slice. [ 5.020350] systemd[1]: Reached target Encrypted Volumes. [ 5.040399] systemd[1]: Reached target Remote File Systems. [ 5.060976] systemd[1]: Created slice System Slice. [ 5.190722] systemd[1]: Starting Nameserver information manager... [ 5.310942] systemd[1]: Created slice system-serial\x2dgetty.slice. [ 5.431183] systemd[1]: Starting Create list of required static device nodes for the current kernel... [ 5.620552] systemd[1]: Mounting POSIX Message Queue File System... [ 5.821191] systemd[1]: Starting Set console keymap... [ 5.961423] systemd[1]: Starting Load Kernel Modules... [ 6.108144] [XRADIO] Driver Label:L34M.01.08.0002 Nov 9 2016 22:04:34 [ 6.108264] [XRADIO] Allocated hw_priv @ c4bff240 [ 6.108523] [XRADIO_ERR] Access_file failed, path:/data/xr_wifi.conf! [ 6.109310] [SBUS] XRadio Device:sdio clk=50000000 [ 6.109642] xradio wlan power on [ 6.109676] gpio wl_reg_on set val 1, act val 1 [ 6.140744] systemd[1]: Mounting Debug File System... [ 6.159730] gpio wl_reg_on set val 0, act val 0 [ 6.160908] systemd[1]: Listening on Syslog Socket. [ 6.161763] gpio wl_reg_on set val 1, act val 1 [ 6.251177] systemd[1]: Starting Restore / save the current clock... [ 6.261874] [XRADIO] Detect SDIO card 1 [ 6.270881] systemd[1]: Listening on /dev/initctl Compatibility Named Pipe. [ 6.290876] systemd[1]: Listening on udev Control Socket. [ 6.310417] systemd[1]: Reached target Slices. [ 6.330478] systemd[1]: Listening on fsck to fsckd communication Socket. [ 6.401220] systemd[1]: Starting Remount Root and Kernel File Systems... [ 6.490769] EXT4-fs (mmcblk0p1): re-mounted. Opts: commit=600,errors=remount-ro [ 6.516200] systemd[1]: Mounted POSIX Message Queue File System. [ 6.530602] systemd[1]: Mounted Debug File System. [ 6.608405] [XRADIO_ERR] xradio_load_firmware: can't read config register, err=-110. [ 6.608439] [XRADIO_ERR] xradio_load_firmware failed(-110). [ 6.944713] xradio wlan power off [ 6.944748] gpio wl_reg_on set val 0, act val 0 [ 6.994805] [XRADIO] Remove SDIO card 1 [ 6.995064] mmc1: card 0001 removed [ 6.995504] [mmc]: sdc1 power_supply is null [ 7.000352] systemd[1]: Started Create list of required static device nodes for the current kernel. [ 7.160317] systemd[1]: Started Set console keymap. [ 7.181460] systemd[1]: systemd-modules-load.service: Main process exited, code=exited, status=1/FAILURE [ 7.360213] systemd[1]: Failed to start Load Kernel Modules. [ 7.400260] systemd[1]: systemd-modules-load.service: Unit entered failed state. [ 7.400475] systemd[1]: systemd-modules-load.service: Failed with result 'exit-code'. [ 7.530249] systemd[1]: Started Restore / save the current clock. [ 7.690237] systemd[1]: Started Remount Root and Kernel File Systems. [ 7.861074] systemd[1]: Started Nameserver information manager. [ 7.987147] systemd[1]: Time has been changed [ 8.151413] systemd[1]: Starting udev Coldplug all Devices... [ 8.321347] systemd[1]: Starting Load/Save Random Seed... [ 8.460600] systemd[1]: Activating swap /var/swap... [ 8.601247] systemd[1]: Starting Apply Kernel Variables... [ 8.641680] Adding 131068k swap on /var/swap. Priority:-1 extents:2 across:204796k SS [ 8.720624] systemd[1]: Mounting FUSE Control File System... [ 8.861193] systemd[1]: Starting Create Static Device Nodes in /dev... [ 8.880995] systemd[1]: Activated swap /var/swap. [ 8.906051] systemd[1]: Mounted FUSE Control File System. [ 9.520497] systemd[1]: Started Load/Save Random Seed. [ 9.690327] systemd[1]: Started Apply Kernel Variables. [ 9.870248] systemd[1]: Started Create Static Device Nodes in /dev. [ 10.010258] systemd[1]: Started udev Coldplug all Devices. [ 10.161096] systemd[1]: Starting udev Kernel Device Manager... [ 10.180459] systemd[1]: Reached target Local File Systems (Pre). [ 10.330684] systemd[1]: Mounting /tmp... [ 10.350669] systemd[1]: Reached target Swap. [ 10.427590] systemd[1]: Mounted /tmp. [ 10.442062] systemd[1]: Started udev Kernel Device Manager. [ 10.450791] systemd[1]: Reached target Local File Systems. [ 10.510956] systemd[1]: Starting Raise network interfaces... [ 10.621427] systemd[1]: Starting Set console font and keymap... [ 10.751427] systemd[1]: Started Entropy daemon using the HAVEGE algorithm. [ 10.871501] systemd[1]: Starting Journal Service... [ 10.941075] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x77) [ 10.941165] bmp085: probe of 0-0077 failed with error -70 [ 10.949746] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x20, dev addr: 0x48) [ 10.950138] sunxi_i2c_do_xfer()985 - [i2c0] incomplete xfer (status: 0x48, dev addr: 0x48) [ 11.124875] systemd[1]: Found device /dev/ttyS0. [ 11.129979] vmouse_input_dev_open [ 11.152406] systemd[1]: Started Journal Service. [ 11.221231] vmouse_input_dev_close [ 11.773581] systemd-journald[234]: Received request to flush runtime journal from PID 1 [ 11.992481] gmac0: probed [ 11.992918] gmac0 gmac0: eth0: eth0: PHY ID 00441400 at 0 IRQ poll (gmac0-0:00) [ 15.990281] PHY: gmac0-0:00 - Link is Up - 100/Full root@orangepizero:~#
