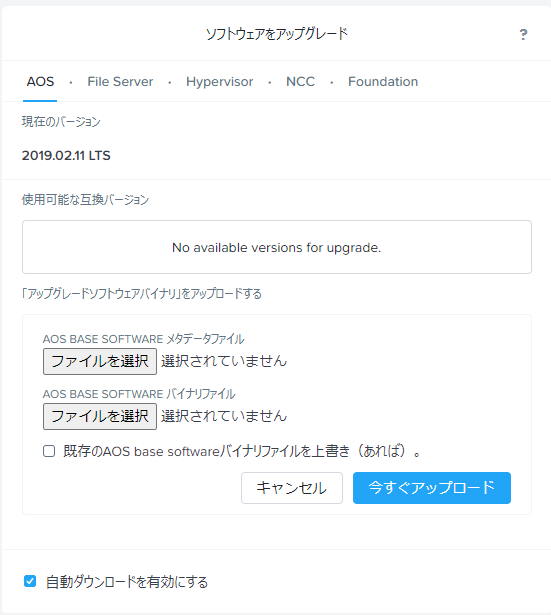
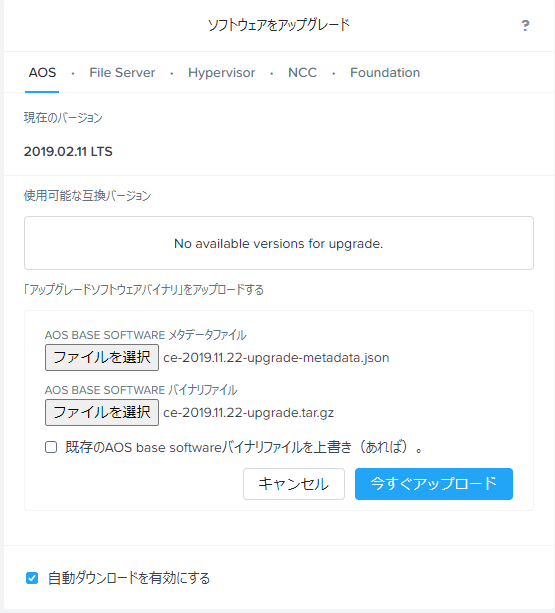
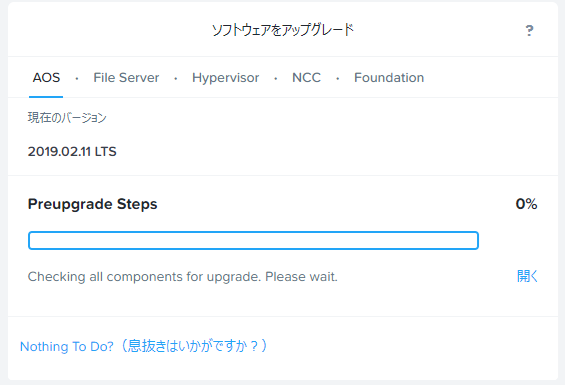
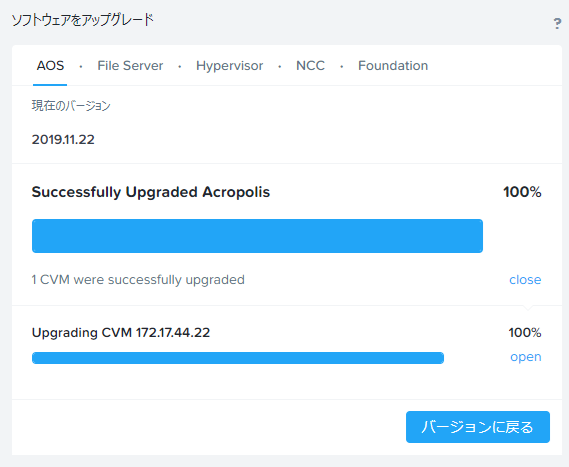
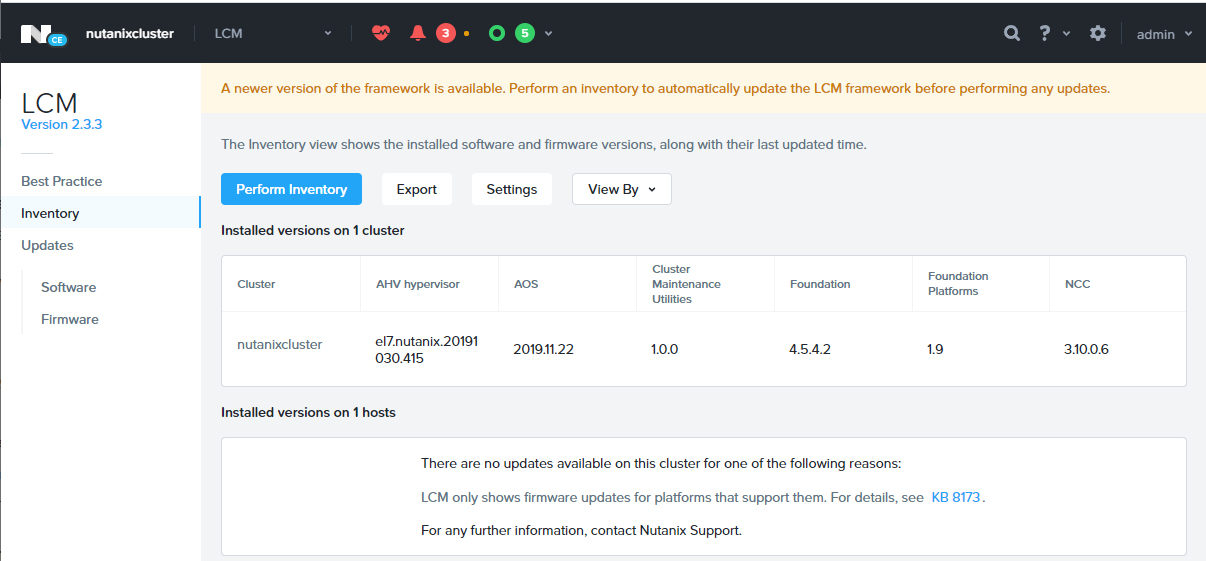
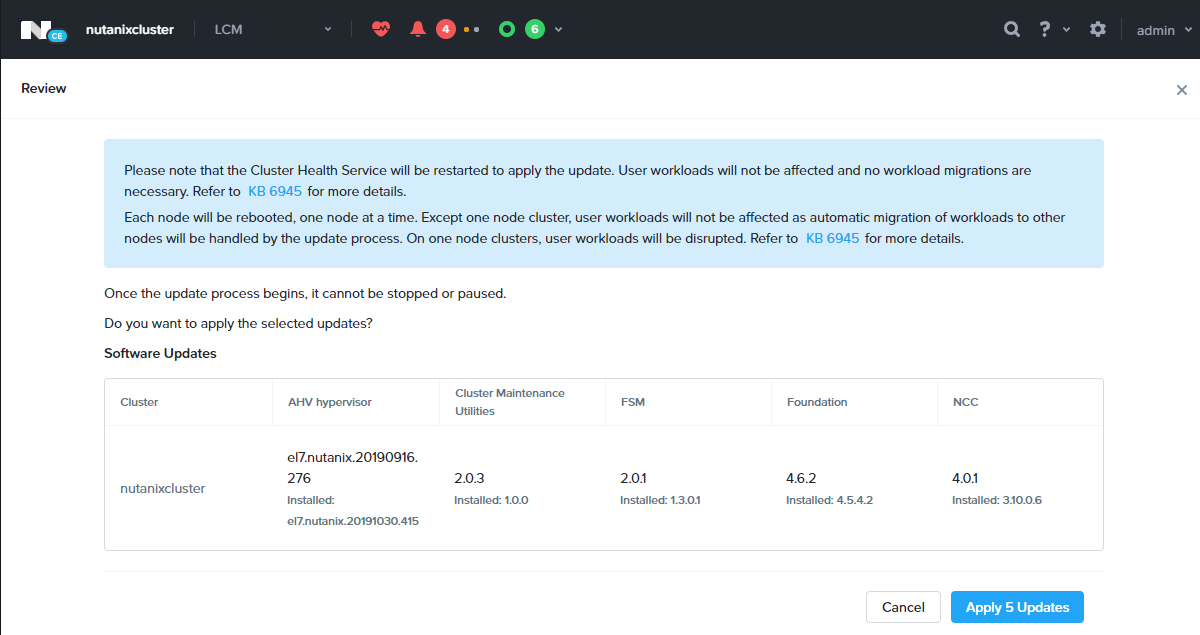
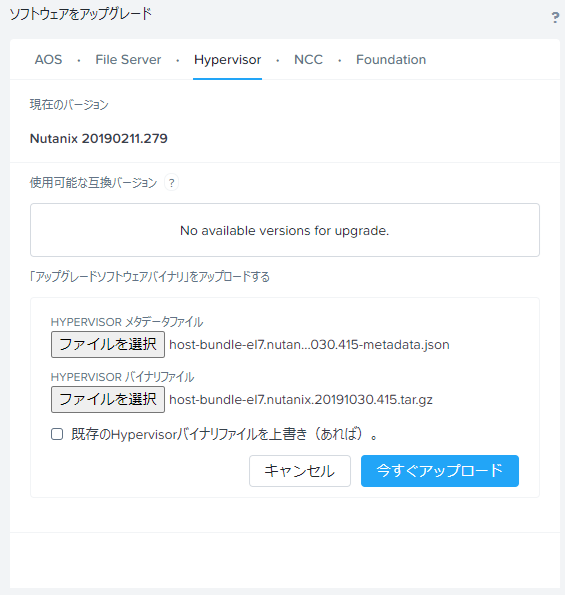
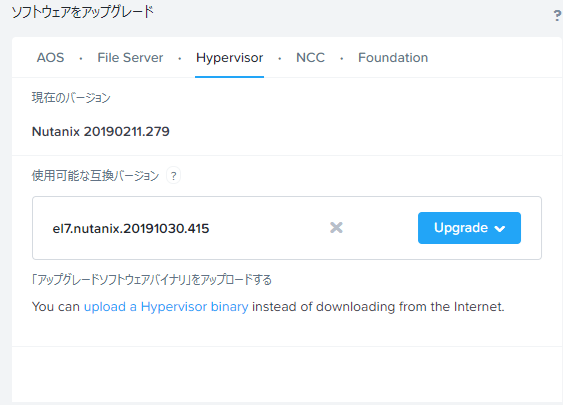
AOS BASE SOFTWAREメタデータファイルは「ce-aos-upgrade-2020.09.16-metadata.json」か「ce-2019.11.22-upgrade-metadata.json」 AOS BASE SOFTWAREバイナリファイルは「ce-aos-upgrade-2020.09.16.tar」か「ce-2019.11.22-upgrade.tar.gz」 を指定する。
// => Hardware select
// #define LILYGO_WATCH_2019_WITH_TOUCH // To use T-Watch2019 with touchscreen, please uncomment this line
// #define LILYGO_WATCH_2019_NO_TOUCH // To use T-Watch2019 Not touchscreen , please uncomment this line
#define LILYGO_WATCH_2020_V1 //To use T-Watch2020, please uncomment this line
// => Function select
#define LILYGO_WATCH_LVGL //To use LVGL, you need to enable the macro LVGL
#include <LilyGoWatch.h>
2020/06/28より前のTWatch_Libraryの場合、「SimpleWatch」のファイル冒頭に「// #define LILYGO_TWATCH_2020_V1 // If you are using T-Watch-2020 version, please open this macro definition」とあるように、T-Watch-2020を使う場合はここのコメントを外す必要がある。
/*
Copyright (c) 2019 lewis he
This is just a demonstration. Most of the functions are not implemented.
The main implementation is low-power standby.
The off-screen standby (not deep sleep) current is about 4mA.
Select standard motherboard and standard backplane for testing.
Created by Lewis he on October 10, 2019.
*/
#define LILYGO_TWATCH_2020_V1 // If you are using T-Watch-2020 version, please open this macro definition
#include <TTGO.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/timers.h"
<以下略>