富士通 Lifebook U938/Sに32GBのメモリを載せてみたところ、オンボード4GBと合わせて36GBメモリ認識として使用できるようになった。
今回買ったのはWINTENのSO-DIMM DDR4 3200 32GBです

まあ2枚セットで買ったので、ついでにN95搭載のTRIGKEY にも載せてみて、N95の仕様上は最大メモリーサイズ16GBと書かれているのが突破できていることも確認したりした。
技術的なことをメインにいろいろ書いてくサイトです
富士通 Lifebook U938/Sに32GBのメモリを載せてみたところ、オンボード4GBと合わせて36GBメモリ認識として使用できるようになった。
今回買ったのはWINTENのSO-DIMM DDR4 3200 32GBです
まあ2枚セットで買ったので、ついでにN95搭載のTRIGKEY にも載せてみて、N95の仕様上は最大メモリーサイズ16GBと書かれているのが突破できていることも確認したりした。
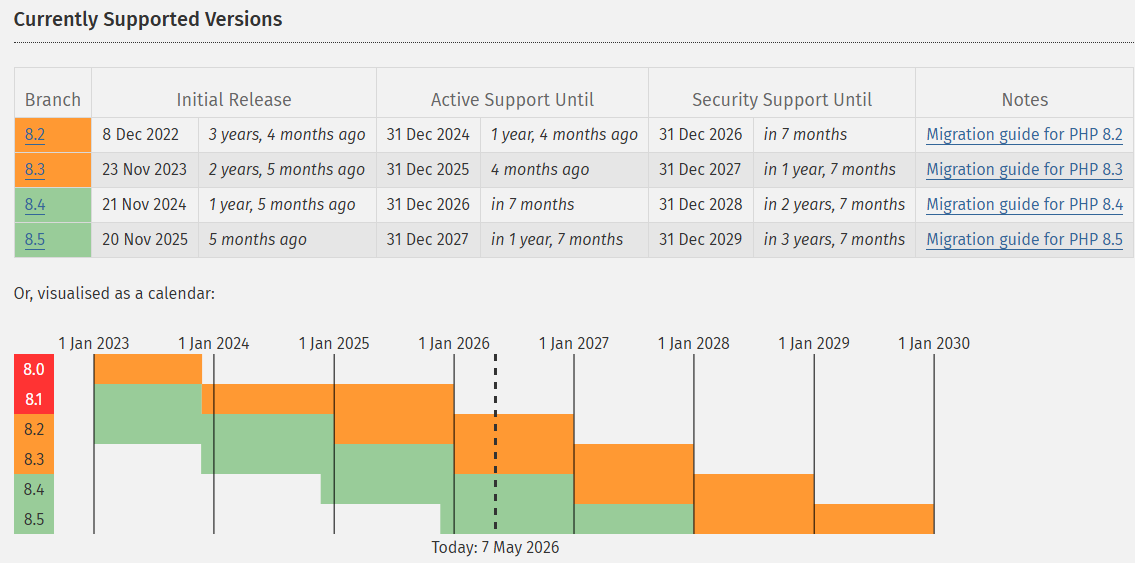
AlmaLinux 9環境でwordpressを動かしているのだが下記の「PHPの更新を推奨」という警告が表示された。
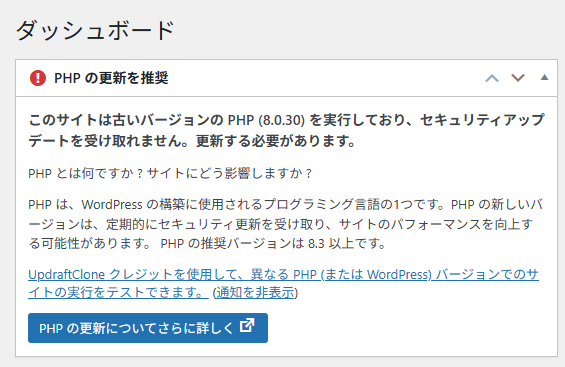
(Updraftプラグインを入れているので、余計な文面も入っている)
PHPの更新について詳しくと書かれているリンク先「より高速で安全なサイトを手に入れましょう: 今すぐ PHP を更新」
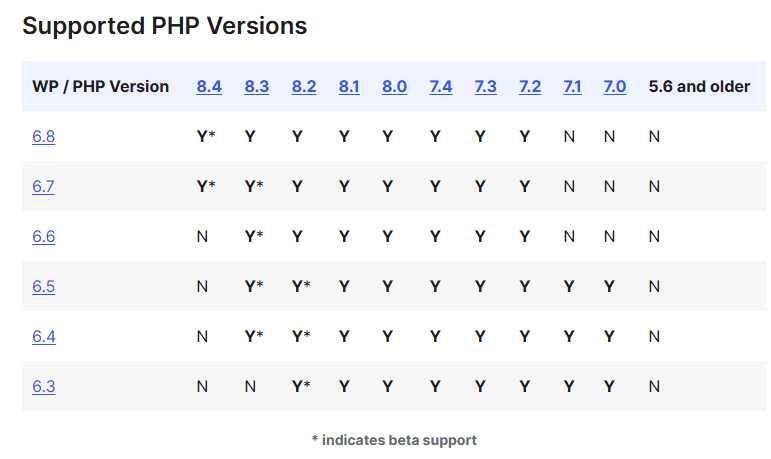
2025/08/14追記 「PHP Compatibility and WordPress Versions」を見ると、PHP 8.3以外のバージョンでもしばらくは大丈夫な模様
RHEL/AlmaLinux/RockyLinux/Oracle Linuxでphp 8.3以降になるのはどこからかを確認すると、標準状態であればRHEL10からになる。
Red Hat Enterprise Linux 10 動的プログラミング言語のインストールおよび使用「第4章 PHP スクリプト言語の使用」
RHEL9ではRHEL9.6からmysql 8.4とともにphp 8.3の提供も追加されている。
Red Hat Enterprise Linux 9 9.6 リリースノート「3.12. 動的プログラミング言語、Web サーバー、およびデータベースサーバー」
RHEL8については、もう新しいリリースはでないので、公式としてphp 8.3がリリースされることはないので3rdパーティーのレポジトリを使う必要があるが、前記の互換性記述を見る限りではPHP 8.2でもしばらくは大丈夫である模様。
RHEL7時代は、Oracle Linuxの「PHP Packages for Oracle Linux」にてRHELでは配布しない新しめのphpも配布してくれていたのですが、いまのところその様子はないので、php 8.2でやる感じか?
2026/05/07追記:php自体のサポートはphp8.3は2026/12/31までとなっているが、RHEL8系はRedHatがメンテナンスサポート終了2029/05/31まではサポートしてくれるはず。延長サポートの2032/05/31まで契約なくてもいけるかは微妙な気がする・・・
RHEL8でphp8.5などを使う方法はとりあえずあって、Remi RPMで「PHP version 8.4.20 and 8.5.5」といったようにRHEL8/9/10向けにremi-safeレポジトリにおいてphp 8.5が提供されている
RHEL9 / AlmaLinux 9環境でphp 8.3を導入できるのは9.6からなので、少なくともそのバージョンへはアップデートを終わらせておく。
そのあと、まずはモジュールとして選択できることを「dnf module list php」を実行して確認する
$ dnf module list php
メタデータの期限切れの最終確認: 0:00:10 前の 2025年07月16日 09時55分14秒 に実施しました。
AlmaLinux 9 - AppStream
Name Stream Profiles Summary
php 8.1 common [d], devel, minimal PHP scripting language
php 8.2 common [d], devel, minimal PHP scripting language
php 8.3 common [d], devel, minimal PHP scripting language
ヒント: [d]efault, [e]nabled, [x]disabled, [i]nstalled
$ php -v
PHP 8.0.30 (cli) (built: May 13 2025 19:33:03) ( NTS gcc x86_64 )
Copyright (c) The PHP Group
Zend Engine v4.0.30, Copyright (c) Zend Technologies
with Zend OPcache v8.0.30, Copyright (c), by Zend Technologies
$
新規インストールの場合は「dnf install @php:8.3」とバージョンを指定してインストールする
$ sudo dnf install @php:8.3
すでにphpがインストール済みの場合は「dnf module switch-to php:8.3」でバージョンを切り替える(11.5. 後のストリームへの切り替え)
$ sudo dnf module switch-to php:8.3
インストール終了後、バージョンを確認
$ dnf module list php
メタデータの期限切れの最終確認: 0:08:21 前の 2025年07月16日 09時55分14秒 に実施しました。
AlmaLinux 9 - AppStream
Name Stream Profiles Summary
php 8.1 common [d], devel, minimal PHP scripting language
php 8.2 common [d], devel, minimal PHP scripting language
php 8.3 [e] common [d], devel, minimal PHP scripting language
ヒント: [d]efault, [e]nabled, [x]disabled, [i]nstalled
$
php 8.3の横に[e]というマークがついて、enabledになった、という表示に切り替わっていることが確認できます。
php -vでバージョンを確認すると 8.3.19 であることも確認できました。
$ php -v
PHP 8.3.19 (cli) (built: Mar 12 2025 13:10:27) (NTS gcc x86_64)
Copyright (c) The PHP Group
Zend Engine v4.3.19, Copyright (c) Zend Technologies
with Zend OPcache v8.3.19, Copyright (c), by Zend Technologies
$
ちなみに・・・うちの環境ではdnf module switch-to php:8.3は素直に実行されてくれませんでした。
$ sudo dnf module switch-to php:8.3
メタデータの期限切れの最終確認: 2:38:13 前の 2025年07月16日 07時18分53秒 に実施しました。
エラー:
問題: インストール済パッケージの問題 php-pecl-imagick-3.7.0-1.el9.x86_64
- package php-pecl-imagick-3.7.0-1.el9.x86_64 from @System requires php(api) = 20200930-64, but none of the providers can be installed
- package php-pecl-imagick-3.7.0-1.el9.x86_64 from @System requires php(zend-abi) = 20200930-64, but none of the providers can be installed
- package php-pecl-imagick-3.7.0-1.el9.x86_64 from epel requires php(api) = 20200930-64, but none of the providers can be installed
- package php-pecl-imagick-3.7.0-1.el9.x86_64 from epel requires php(zend-abi) = 20200930-64, but none of the providers can be installed
- php-common-8.0.30-3.el9_6.x86_64 from @System does not belong to a distupgrade repository
- package php-common-8.0.30-3.el9_6.x86_64 from appstream is filtered out by modular filtering
(インストール不可のパッケージをスキップするには、'--skip-broken' を追加してみてください または、'--nobest' を追加して、最適候補のパッケージのみを使用しないでください)
$
理由はepelレポジトリからインストールしたphp-pecl-imagick パッケージ
$ dnf info php-pecl-imagick
メタデータの期限切れの最終確認: 0:02:32 前の 2025年07月16日 09時55分14秒 に実施しました。
インストール済みパッケージ
名前 : php-pecl-imagick
バージョン : 3.7.0
リリース : 1.el9
Arch : x86_64
サイズ : 554 k
ソース : php-pecl-imagick-3.7.0-1.el9.src.rpm
リポジトリー : @System
repo から : epel
概要 : Provides a wrapper to the ImageMagick library
URL : https://pecl.php.net/package/imagick
ライセンス : PHP
説明 : Imagick is a native php extension to create and modify images using the
: ImageMagick API.
$
アンインストールをしてみたところ関係するパッケージが多くてびっくりしました。
$ sudo dnf remove php-pecl-imagick
依存関係が解決しました。
===========================================================================================================
パッケージ Arch バージョン リポジトリー サイズ
===========================================================================================================
削除中:
php-pecl-imagick x86_64 3.7.0-1.el9 @epel 554 k
未使用の依存関係の削除:
ImageMagick-libs x86_64 6.9.13.25-1.el9 @epel 8.3 M
LibRaw x86_64 0.21.1-1.el9 @appstream 2.4 M
ModemManager-glib x86_64 1.20.2-1.el9 @baseos 1.5 M
abattis-cantarell-fonts noarch 0.301-4.el9 @appstream 705 k
adobe-mappings-cmap noarch 20171205-12.el9 @appstream 13 M
adobe-mappings-cmap-deprecated noarch 20171205-12.el9 @appstream 583 k
adobe-mappings-pdf noarch 20180407-10.el9 @appstream 4.2 M
adobe-source-code-pro-fonts noarch 2.030.1.050-12.el9.1 @baseos 1.8 M
adwaita-cursor-theme noarch 40.1.1-3.el9 @appstream 12 M
adwaita-icon-theme noarch 40.1.1-3.el9 @appstream 11 M
at-spi2-atk x86_64 2.38.0-4.el9 @appstream 272 k
at-spi2-core x86_64 2.40.3-1.el9 @appstream 516 k
atk x86_64 2.36.0-5.el9 @appstream 1.2 M
avahi-glib x86_64 0.8-22.el9_6 @appstream 19 k
avahi-libs x86_64 0.8-22.el9_6 @baseos 173 k
bluez-libs x86_64 5.72-4.el9 @baseos 214 k
bubblewrap x86_64 0.4.1-8.el9_5 @baseos 101 k
cairo x86_64 1.17.4-7.el9 @appstream 1.6 M
cairo-gobject x86_64 1.17.4-7.el9 @appstream 43 k
colord-libs x86_64 1.4.5-6.el9_6 @appstream 830 k
composefs-libs x86_64 1.0.8-1.el9 @appstream 143 k
cups-libs x86_64 1:2.3.3op2-33.el9 @baseos 670 k
dconf x86_64 0.40.0-6.el9 @appstream 305 k
dejavu-sans-fonts noarch 2.37-18.el9 @baseos 5.7 M
exempi x86_64 2.6.0-0.2.20211007gite23c213.el9 @appstream 1.3 M
exiv2 x86_64 0.27.5-2.el9 @appstream 4.4 M
exiv2-libs x86_64 0.27.5-2.el9 @appstream 2.7 M
fdk-aac-free x86_64 2.0.0-8.el9 @appstream 588 k
flac-libs x86_64 1.3.3-10.el9_2.1 @appstream 549 k
flatpak x86_64 1.12.9-4.el9_6 @appstream 7.7 M
flatpak-selinux noarch 1.12.9-4.el9_6 @appstream 13 k
flatpak-session-helper x86_64 1.12.9-4.el9_6 @appstream 210 k
fontconfig x86_64 2.14.0-2.el9_1 @appstream 818 k
fonts-filesystem noarch 1:2.0.5-7.el9.1 @baseos 0
fribidi x86_64 1.0.10-6.el9.2 @appstream 339 k
fuse x86_64 2.9.9-17.el9 @baseos 214 k
fuse-common x86_64 3.10.2-9.el9 @baseos 38
gd x86_64 2.3.2-3.el9 @appstream 412 k
gdk-pixbuf2 x86_64 2.42.6-4.el9_4 @appstream 2.5 M
gdk-pixbuf2-modules x86_64 2.42.6-4.el9_4 @appstream 265 k
geoclue2 x86_64 2.6.0-8.el9_6.1 @appstream 359 k
giflib x86_64 5.2.1-9.el9 @appstream 106 k
glib-networking x86_64 2.68.3-3.el9 @baseos 640 k
google-droid-sans-fonts noarch 20200215-11.el9.2 @appstream 6.3 M
graphene x86_64 1.10.6-2.el9 @appstream 167 k
graphviz x86_64 2.44.0-26.el9 @appstream 12 M
gsettings-desktop-schemas x86_64 40.0-6.el9 @baseos 4.5 M
gsm x86_64 1.0.19-6.el9 @appstream 64 k
gstreamer1 x86_64 1.22.12-3.el9 @appstream 4.8 M
gstreamer1-plugins-base x86_64 1.22.12-4.el9 @appstream 7.3 M
gtk-update-icon-cache x86_64 3.24.31-5.el9 @appstream 66 k
gtk2 x86_64 2.24.33-8.el9 @appstream 13 M
gtk3 x86_64 3.24.31-5.el9 @appstream 20 M
hicolor-icon-theme noarch 0.17-13.el9 @appstream 72 k
imath x86_64 3.1.2-1.el9 @appstream 363 k
iso-codes noarch 4.6.0-3.el9 @appstream 19 M
jasper-libs x86_64 2.0.28-3.el9 @appstream 326 k
jbig2dec-libs x86_64 0.19-7.el9 @appstream 164 k
jbigkit-libs x86_64 2.1-23.el9 @appstream 114 k
langpacks-core-font-en noarch 3.0-16.el9 @appstream 351
lcms2 x86_64 2.12-3.el9 @appstream 399 k
libICE x86_64 1.0.10-8.el9 @appstream 171 k
libSM x86_64 1.2.3-10.el9 @appstream 93 k
libX11 x86_64 1.7.0-11.el9 @appstream 1.3 M
libX11-common noarch 1.7.0-11.el9 @appstream 1.3 M
libX11-xcb x86_64 1.7.0-11.el9 @appstream 15 k
libXau x86_64 1.0.9-8.el9 @appstream 63 k
libXaw x86_64 1.0.13-19.el9 @appstream 498 k
libXcomposite x86_64 0.4.5-7.el9 @appstream 41 k
libXcursor x86_64 1.2.0-7.el9 @appstream 50 k
libXdamage x86_64 1.1.5-7.el9 @appstream 36 k
libXext x86_64 1.3.4-8.el9 @appstream 93 k
libXfixes x86_64 5.0.3-16.el9 @appstream 35 k
libXft x86_64 2.3.3-8.el9 @appstream 133 k
libXi x86_64 1.7.10-8.el9 @appstream 73 k
libXinerama x86_64 1.1.4-10.el9 @appstream 19 k
libXmu x86_64 1.1.3-8.el9 @appstream 184 k
libXpm x86_64 3.5.13-10.el9 @appstream 126 k
libXrandr x86_64 1.5.2-8.el9 @appstream 52 k
libXrender x86_64 0.9.10-16.el9 @appstream 50 k
libXt x86_64 1.2.0-6.el9 @appstream 443 k
libXtst x86_64 1.2.3-16.el9 @appstream 38 k
libXv x86_64 1.0.11-16.el9 @appstream 26 k
libXxf86vm x86_64 1.1.4-18.el9 @appstream 26 k
libappstream-glib x86_64 0.7.18-5.el9_4 @appstream 1.4 M
libasyncns x86_64 0.8-22.el9 @appstream 59 k
libatomic x86_64 11.5.0-5.el9_5.alma.1 @baseos 29 k
libcanberra x86_64 0.30-27.el9 @appstream 281 k
libcanberra-gtk2 x86_64 0.30-27.el9 @appstream 54 k
libcanberra-gtk3 x86_64 0.30-27.el9 @appstream 74 k
libdrm x86_64 2.4.123-2.el9 @appstream 407 k
libepoxy x86_64 1.5.5-4.el9 @appstream 1.2 M
libexif x86_64 0.6.22-6.el9 @appstream 2.3 M
libfontenc x86_64 1.1.3-17.el9 @appstream 63 k
libgexiv2 x86_64 0.12.3-1.el9 @appstream 225 k
libglvnd x86_64 1:1.3.4-1.el9 @appstream 778 k
libglvnd-egl x86_64 1:1.3.4-1.el9 @appstream 69 k
libglvnd-glx x86_64 1:1.3.4-1.el9 @appstream 678 k
libgs x86_64 9.54.0-19.el9_6 @appstream 19 M
libgsf x86_64 1.14.47-5.el9 @appstream 941 k
libgxps x86_64 0.3.2-3.el9 @appstream 193 k
libijs x86_64 0.35-15.el9 @appstream 66 k
libiptcdata x86_64 1.0.5-10.el9 @appstream 172 k
libjpeg-turbo x86_64 2.0.90-7.el9 @appstream 633 k
libldac x86_64 2.0.2.3-10.el9 @appstream 79 k
liblqr-1 x86_64 0.4.2-19.el9 @epel 97 k
libnotify x86_64 0.7.9-8.el9 @appstream 99 k
libogg x86_64 2:1.3.4-6.el9 @appstream 49 k
libosinfo x86_64 1.10.0-1.el9 @appstream 1.2 M
libpaper x86_64 1.1.28-4.el9 @appstream 95 k
libpciaccess x86_64 0.16-7.el9 @baseos 48 k
libproxy x86_64 0.4.15-35.el9 @baseos 163 k
libproxy-webkitgtk4 x86_64 0.4.15-35.el9 @appstream 32 k
libraqm x86_64 0.8.0-1.el9 @epel 29 k
librsvg2 x86_64 2.50.7-3.el9 @appstream 10 M
libsbc x86_64 1.4-9.el9 @appstream 81 k
libsndfile x86_64 1.0.31-9.el9 @appstream 521 k
libsoup x86_64 2.72.0-10.el9_6.2 @appstream 1.2 M
libstemmer x86_64 0-18.585svn.el9 @appstream 344 k
libtheora x86_64 1:1.1.1-31.el9 @appstream 463 k
libtiff x86_64 4.4.0-13.el9 @appstream 573 k
libtracker-sparql x86_64 3.1.2-3.el9_1 @appstream 1.0 M
libvorbis x86_64 1:1.3.7-5.el9 @appstream 903 k
libwayland-client x86_64 1.21.0-1.el9 @appstream 70 k
libwayland-cursor x86_64 1.21.0-1.el9 @appstream 37 k
libwayland-egl x86_64 1.21.0-1.el9 @appstream 16 k
libwayland-server x86_64 1.21.0-1.el9 @appstream 86 k
libwebp x86_64 1.2.0-8.el9_3 @appstream 769 k
libwmf-lite x86_64 0.2.12-10.el9 @appstream 164 k
libxcb x86_64 1.13.1-9.el9 @appstream 1.1 M
libxkbcommon x86_64 1.0.3-4.el9 @appstream 317 k
libxshmfence x86_64 1.3-10.el9 @appstream 16 k
low-memory-monitor x86_64 2.1-4.el9 @appstream 70 k
mesa-dri-drivers x86_64 24.2.8-2.el9_6.alma.1 @appstream 37 M
mesa-filesystem x86_64 24.2.8-2.el9_6.alma.1 @appstream 3.6 k
mesa-libEGL x86_64 24.2.8-2.el9_6.alma.1 @appstream 394 k
mesa-libGL x86_64 24.2.8-2.el9_6.alma.1 @appstream 508 k
mesa-libgbm x86_64 24.2.8-2.el9_6.alma.1 @appstream 64 k
mesa-libglapi x86_64 24.2.8-2.el9_6.alma.1 @appstream 217 k
mkfontscale x86_64 1.2.1-3.el9 @appstream 54 k
openexr-libs x86_64 3.1.1-3.el9 @appstream 4.7 M
openjpeg2 x86_64 2.4.0-8.el9 @appstream 376 k
opus x86_64 1.3.1-10.el9 @appstream 355 k
orc x86_64 0.4.31-8.el9 @appstream 601 k
osinfo-db noarch 20250124-2.el9_6.alma.2 @appstream 3.9 M
osinfo-db-tools x86_64 1.10.0-1.el9 @appstream 177 k
ostree-libs x86_64 2025.1-1.el9 @appstream 1.1 M
p11-kit-server x86_64 0.25.3-3.el9_5 @appstream 1.3 M
pango x86_64 1.48.7-3.el9 @appstream 878 k
pipewire x86_64 1.0.1-1.el9 @appstream 351 k
pipewire-alsa x86_64 1.0.1-1.el9 @appstream 173 k
pipewire-jack-audio-connection-kit x86_64 1.0.1-1.el9 @appstream 30
pipewire-jack-audio-connection-kit-libs x86_64 1.0.1-1.el9 @appstream 547 k
pipewire-libs x86_64 1.0.1-1.el9 @appstream 7.6 M
pipewire-pulseaudio x86_64 1.0.1-1.el9 @appstream 427 k
pixman x86_64 0.40.0-6.el9_3 @appstream 694 k
poppler x86_64 21.01.0-21.el9 @appstream 3.6 M
poppler-data noarch 0.4.9-9.el9 @appstream 11 M
poppler-glib x86_64 21.01.0-21.el9 @appstream 477 k
pulseaudio-libs x86_64 15.0-3.el9 @appstream 3.2 M
rtkit x86_64 0.11-29.el9 @appstream 146 k
sound-theme-freedesktop noarch 0.8-17.el9 @appstream 460 k
totem-pl-parser x86_64 3.26.6-2.el9 @appstream 330 k
tracker x86_64 3.1.2-3.el9_1 @appstream 2.0 M
tracker-miners x86_64 3.1.2-4.el9_3 @appstream 4.0 M
upower x86_64 0.99.13-2.el9 @appstream 547 k
urw-base35-bookman-fonts noarch 20200910-6.el9 @appstream 1.4 M
urw-base35-c059-fonts noarch 20200910-6.el9 @appstream 1.4 M
urw-base35-d050000l-fonts noarch 20200910-6.el9 @appstream 85 k
urw-base35-fonts noarch 20200910-6.el9 @appstream 5.3 k
urw-base35-fonts-common noarch 20200910-6.el9 @appstream 37 k
urw-base35-gothic-fonts noarch 20200910-6.el9 @appstream 1.2 M
urw-base35-nimbus-mono-ps-fonts noarch 20200910-6.el9 @appstream 1.0 M
urw-base35-nimbus-roman-fonts noarch 20200910-6.el9 @appstream 1.4 M
urw-base35-nimbus-sans-fonts noarch 20200910-6.el9 @appstream 2.4 M
urw-base35-p052-fonts noarch 20200910-6.el9 @appstream 1.5 M
urw-base35-standard-symbols-ps-fonts noarch 20200910-6.el9 @appstream 44 k
urw-base35-z003-fonts noarch 20200910-6.el9 @appstream 391 k
webkit2gtk3-jsc x86_64 2.48.3-1.el9_6 @appstream 28 M
webrtc-audio-processing x86_64 0.3.1-8.el9 @appstream 734 k
wireplumber x86_64 0.4.14-1.el9 @appstream 301 k
wireplumber-libs x86_64 0.4.14-1.el9 @appstream 1.2 M
xdg-dbus-proxy x86_64 0.1.3-1.el9 @appstream 85 k
xdg-desktop-portal x86_64 1.12.6-1.el9 @appstream 1.8 M
xdg-desktop-portal-gtk x86_64 1.12.0-3.el9 @appstream 478 k
xkeyboard-config noarch 2.33-2.el9 @appstream 5.8 M
xml-common noarch 0.6.3-58.el9 @appstream 78 k
xorg-x11-fonts-ISO8859-1-100dpi noarch 7.5-33.el9 @appstream 1.0 M
トランザクションの概要
===========================================================================================================
削除 189 パッケージ
解放された容量: 369 M
これでよろしいですか? [y/N]: y
トランザクションを確認しています
トランザクションの確認に成功しました。
トランザクションをテストしています
トランザクションのテストに成功しました。
トランザクションを実行しています
準備中 : 1/1
削除中 : flatpak-1.12.9-4.el9_6.x86_64 1/189
削除中 : libappstream-glib-0.7.18-5.el9_4.x86_64 2/189
削除中 : php-pecl-imagick-3.7.0-1.el9.x86_64 3/189
削除中 : ImageMagick-libs-6.9.13.25-1.el9.x86_64 4/189
削除中 : graphviz-2.44.0-26.el9.x86_64 5/189
削除中 : gtk2-2.24.33-8.el9.x86_64 6/189
削除中 : libgs-9.54.0-19.el9_6.x86_64 7/189
削除中 : libcanberra-gtk2-0.30-27.el9.x86_64 8/189
削除中 : urw-base35-fonts-20200910-6.el9.noarch 9/189
scriptletの実行中: xdg-desktop-portal-gtk-1.12.0-3.el9.x86_64 10/189
削除中 : xdg-desktop-portal-gtk-1.12.0-3.el9.x86_64 10/189
削除中 : gtk3-3.24.31-5.el9.x86_64 11/189
削除中 : libcanberra-gtk3-0.30-27.el9.x86_64 12/189
削除中 : librsvg2-2.50.7-3.el9.x86_64 13/189
削除中 : cairo-gobject-1.17.4-7.el9.x86_64 14/189
削除中 : gd-2.3.2-3.el9.x86_64 15/189
scriptletの実行中: libcanberra-0.30-27.el9.x86_64 16/189
削除中 : libcanberra-0.30-27.el9.x86_64 16/189
scriptletの実行中: xdg-desktop-portal-1.12.6-1.el9.x86_64 17/189
削除中 : xdg-desktop-portal-1.12.6-1.el9.x86_64 17/189
削除中 : wireplumber-libs-0.4.14-1.el9.x86_64 18/189
scriptletの実行中: wireplumber-0.4.14-1.el9.x86_64 19/189
Removed "/etc/systemd/user/pipewire-session-manager.service".
Removed "/etc/systemd/user/pipewire.service.wants/wireplumber.service".
削除中 : wireplumber-0.4.14-1.el9.x86_64 19/189
削除中 : pipewire-alsa-1.0.1-1.el9.x86_64 20/189
削除中 : pipewire-jack-audio-connection-kit-libs-1.0.1-1.el9.x86_64 21/189
削除中 : pipewire-jack-audio-connection-kit-1.0.1-1.el9.x86_64 22/189
削除中 : pipewire-libs-1.0.1-1.el9.x86_64 23/189
削除中 : pipewire-pulseaudio-1.0.1-1.el9.x86_64 24/189
削除中 : pipewire-1.0.1-1.el9.x86_64 25/189
scriptletの実行中: geoclue2-2.6.0-8.el9_6.1.x86_64 26/189
削除中 : geoclue2-2.6.0-8.el9_6.1.x86_64 26/189
scriptletの実行中: geoclue2-2.6.0-8.el9_6.1.x86_64 26/189
削除中 : libXaw-1.0.13-19.el9.x86_64 27/189
削除中 : LibRaw-0.21.1-1.el9.x86_64 28/189
削除中 : urw-base35-bookman-fonts-20200910-6.el9.noarch 29/189
scriptletの実行中: urw-base35-bookman-fonts-20200910-6.el9.noarch 29/189
削除中 : urw-base35-c059-fonts-20200910-6.el9.noarch 30/189
scriptletの実行中: urw-base35-c059-fonts-20200910-6.el9.noarch 30/189
削除中 : urw-base35-d050000l-fonts-20200910-6.el9.noarch 31/189
scriptletの実行中: urw-base35-d050000l-fonts-20200910-6.el9.noarch 31/189
削除中 : urw-base35-gothic-fonts-20200910-6.el9.noarch 32/189
scriptletの実行中: urw-base35-gothic-fonts-20200910-6.el9.noarch 32/189
削除中 : urw-base35-nimbus-mono-ps-fonts-20200910-6.el9.noarch 33/189
scriptletの実行中: urw-base35-nimbus-mono-ps-fonts-20200910-6.el9.noarch 33/189
削除中 : urw-base35-nimbus-roman-fonts-20200910-6.el9.noarch 34/189
scriptletの実行中: urw-base35-nimbus-roman-fonts-20200910-6.el9.noarch 34/189
削除中 : urw-base35-nimbus-sans-fonts-20200910-6.el9.noarch 35/189
scriptletの実行中: urw-base35-nimbus-sans-fonts-20200910-6.el9.noarch 35/189
削除中 : urw-base35-p052-fonts-20200910-6.el9.noarch 36/189
scriptletの実行中: urw-base35-p052-fonts-20200910-6.el9.noarch 36/189
削除中 : urw-base35-standard-symbols-ps-fonts-20200910-6.el9.noarch 37/189
scriptletの実行中: urw-base35-standard-symbols-ps-fonts-20200910-6.el9.noarch 37/189
削除中 : urw-base35-z003-fonts-20200910-6.el9.noarch 38/189
scriptletの実行中: urw-base35-z003-fonts-20200910-6.el9.noarch 38/189
削除中 : xorg-x11-fonts-ISO8859-1-100dpi-7.5-33.el9.noarch 39/189
scriptletの実行中: xorg-x11-fonts-ISO8859-1-100dpi-7.5-33.el9.noarch 39/189
削除中 : pulseaudio-libs-15.0-3.el9.x86_64 40/189
削除中 : libsndfile-1.0.31-9.el9.x86_64 41/189
削除中 : gdk-pixbuf2-modules-2.42.6-4.el9_4.x86_64 42/189
削除中 : libXcursor-1.2.0-7.el9.x86_64 43/189
削除中 : libXrandr-1.5.2-8.el9.x86_64 44/189
削除中 : at-spi2-atk-2.38.0-4.el9.x86_64 45/189
削除中 : at-spi2-core-2.40.3-1.el9.x86_64 46/189
削除中 : libXtst-1.2.3-16.el9.x86_64 47/189
削除中 : libXmu-1.1.3-8.el9.x86_64 48/189
削除中 : libXt-1.2.0-6.el9.x86_64 49/189
削除中 : libXinerama-1.1.4-10.el9.x86_64 50/189
scriptletの実行中: tracker-3.1.2-3.el9_1.x86_64 51/189
削除中 : tracker-3.1.2-3.el9_1.x86_64 51/189
scriptletの実行中: tracker-3.1.2-3.el9_1.x86_64 51/189
scriptletの実行中: tracker-miners-3.1.2-4.el9_3.x86_64 52/189
削除中 : tracker-miners-3.1.2-4.el9_3.x86_64 52/189
scriptletの実行中: tracker-miners-3.1.2-4.el9_3.x86_64 52/189
削除中 : libtracker-sparql-3.1.2-3.el9_1.x86_64 53/189
削除中 : gstreamer1-plugins-base-1.22.12-4.el9.x86_64 54/189
削除中 : pango-1.48.7-3.el9.x86_64 55/189
削除中 : libgxps-0.3.2-3.el9.x86_64 56/189
削除中 : libglvnd-glx-1:1.3.4-1.el9.x86_64 57/189
削除中 : mesa-libGL-24.2.8-2.el9_6.alma.1.x86_64 58/189
削除中 : libglvnd-egl-1:1.3.4-1.el9.x86_64 59/189
削除中 : mesa-libEGL-24.2.8-2.el9_6.alma.1.x86_64 60/189
削除中 : mesa-libglapi-24.2.8-2.el9_6.alma.1.x86_64 61/189
削除中 : mesa-dri-drivers-24.2.8-2.el9_6.alma.1.x86_64 62/189
削除中 : mesa-libgbm-24.2.8-2.el9_6.alma.1.x86_64 63/189
削除中 : libXft-2.3.3-8.el9.x86_64 64/189
削除中 : libXxf86vm-1.1.4-18.el9.x86_64 65/189
削除中 : libXi-1.7.10-8.el9.x86_64 66/189
削除中 : libXv-1.0.11-16.el9.x86_64 67/189
削除中 : libosinfo-1.10.0-1.el9.x86_64 68/189
削除中 : poppler-glib-21.01.0-21.el9.x86_64 69/189
削除中 : cairo-1.17.4-7.el9.x86_64 70/189
削除中 : poppler-21.01.0-21.el9.x86_64 71/189
削除中 : fontconfig-2.14.0-2.el9_1.x86_64 72/189
scriptletの実行中: fontconfig-2.14.0-2.el9_1.x86_64 72/189
削除中 : libtiff-4.4.0-13.el9.x86_64 73/189
削除中 : libXext-1.3.4-8.el9.x86_64 74/189
削除中 : libXrender-0.9.10-16.el9.x86_64 75/189
削除中 : jasper-libs-2.0.28-3.el9.x86_64 76/189
削除中 : avahi-glib-0.8-22.el9_6.x86_64 77/189
削除中 : libXdamage-1.1.5-7.el9.x86_64 78/189
削除中 : libXfixes-5.0.3-16.el9.x86_64 79/189
削除中 : cups-libs-1:2.3.3op2-33.el9.x86_64 80/189
削除中 : exiv2-0.27.5-2.el9.x86_64 81/189
削除中 : langpacks-core-font-en-3.0-16.el9.noarch 82/189
削除中 : dejavu-sans-fonts-2.37-18.el9.noarch 83/189
削除中 : iso-codes-4.6.0-3.el9.noarch 84/189
削除中 : urw-base35-fonts-common-20200910-6.el9.noarch 85/189
削除中 : adwaita-icon-theme-40.1.1-3.el9.noarch 86/189
削除中 : adobe-mappings-cmap-deprecated-20171205-12.el9.noarch 87/189
削除中 : google-droid-sans-fonts-20200215-11.el9.2.noarch 88/189
削除中 : osinfo-db-tools-1.10.0-1.el9.x86_64 89/189
削除中 : libsoup-2.72.0-10.el9_6.2.x86_64 90/189
削除中 : glib-networking-2.68.3-3.el9.x86_64 91/189
削除中 : libproxy-webkitgtk4-0.4.15-35.el9.x86_64 92/189
削除中 : gsettings-desktop-schemas-40.0-6.el9.x86_64 93/189
削除中 : webkit2gtk3-jsc-2.48.3-1.el9_6.x86_64 94/189
削除中 : adobe-source-code-pro-fonts-2.030.1.050-12.el9.1.noarch 95/189
削除中 : abattis-cantarell-fonts-0.301-4.el9.noarch 96/189
削除中 : libdrm-2.4.123-2.el9.x86_64 97/189
削除中 : libtheora-1:1.1.1-31.el9.x86_64 98/189
削除中 : libvorbis-1:1.3.7-5.el9.x86_64 99/189
削除中 : libwayland-cursor-1.21.0-1.el9.x86_64 100/189
削除中 : libgexiv2-0.12.3-1.el9.x86_64 101/189
削除中 : libgsf-1.14.47-5.el9.x86_64 102/189
削除中 : libSM-1.2.3-10.el9.x86_64 103/189
削除中 : flac-libs-1.3.3-10.el9_2.1.x86_64 104/189
削除中 : mkfontscale-1.2.1-3.el9.x86_64 105/189
削除中 : libXpm-3.5.13-10.el9.x86_64 106/189
削除中 : libnotify-0.7.9-8.el9.x86_64 107/189
削除中 : fuse-2.9.9-17.el9.x86_64 108/189
削除中 : gtk-update-icon-cache-3.24.31-5.el9.x86_64 109/189
削除中 : gdk-pixbuf2-2.42.6-4.el9_4.x86_64 110/189
削除中 : libXcomposite-0.4.5-7.el9.x86_64 111/189
削除中 : libX11-1.7.0-11.el9.x86_64 112/189
削除中 : libxcb-1.13.1-9.el9.x86_64 113/189
削除中 : colord-libs-1.4.5-6.el9_6.x86_64 114/189
削除中 : libxkbcommon-1.0.3-4.el9.x86_64 115/189
削除中 : openexr-libs-3.1.1-3.el9.x86_64 116/189
削除中 : libraqm-0.8.0-1.el9.x86_64 117/189
削除中 : ostree-libs-2025.1-1.el9.x86_64 118/189
削除中 : xkeyboard-config-2.33-2.el9.noarch 119/189
削除中 : libX11-common-1.7.0-11.el9.noarch 120/189
削除中 : fuse-common-3.10.2-9.el9.x86_64 121/189
削除中 : fonts-filesystem-1:2.0.5-7.el9.1.noarch 122/189
削除中 : adobe-mappings-cmap-20171205-12.el9.noarch 123/189
削除中 : adwaita-cursor-theme-40.1.1-3.el9.noarch 124/189
削除中 : xml-common-0.6.3-58.el9.noarch 125/189
警告: /etc/xml/catalog saved as /etc/xml/catalog.rpmsave
削除中 : poppler-data-0.4.9-9.el9.noarch 126/189
削除中 : osinfo-db-20250124-2.el9_6.alma.2.noarch 127/189
削除中 : mesa-filesystem-24.2.8-2.el9_6.alma.1.x86_64 128/189
削除中 : sound-theme-freedesktop-0.8-17.el9.noarch 129/189
scriptletの実行中: sound-theme-freedesktop-0.8-17.el9.noarch 129/189
削除中 : hicolor-icon-theme-0.17-13.el9.noarch 130/189
削除中 : adobe-mappings-pdf-20180407-10.el9.noarch 131/189
削除中 : flatpak-selinux-1.12.9-4.el9_6.noarch 132/189
scriptletの実行中: flatpak-selinux-1.12.9-4.el9_6.noarch 132/189
削除中 : composefs-libs-1.0.8-1.el9.x86_64 133/189
削除中 : fribidi-1.0.10-6.el9.2.x86_64 134/189
削除中 : imath-3.1.2-1.el9.x86_64 135/189
削除中 : lcms2-2.12-3.el9.x86_64 136/189
削除中 : libXau-1.0.9-8.el9.x86_64 137/189
削除中 : libjpeg-turbo-2.0.90-7.el9.x86_64 138/189
削除中 : libfontenc-1.1.3-17.el9.x86_64 139/189
削除中 : libogg-2:1.3.4-6.el9.x86_64 140/189
削除中 : libICE-1.0.10-8.el9.x86_64 141/189
削除中 : exiv2-libs-0.27.5-2.el9.x86_64 142/189
削除中 : libwayland-client-1.21.0-1.el9.x86_64 143/189
削除中 : libpciaccess-0.16-7.el9.x86_64 144/189
削除中 : libatomic-11.5.0-5.el9_5.alma.1.x86_64 145/189
削除中 : libproxy-0.4.15-35.el9.x86_64 146/189
削除中 : avahi-libs-0.8-22.el9_6.x86_64 147/189
削除中 : jbigkit-libs-2.1-23.el9.x86_64 148/189
削除中 : libwebp-1.2.0-8.el9_3.x86_64 149/189
削除中 : openjpeg2-2.4.0-8.el9.x86_64 150/189
削除中 : pixman-0.40.0-6.el9_3.x86_64 151/189
削除中 : libwayland-server-1.21.0-1.el9.x86_64 152/189
削除中 : libX11-xcb-1.7.0-11.el9.x86_64 153/189
削除中 : libxshmfence-1.3-10.el9.x86_64 154/189
削除中 : libglvnd-1:1.3.4-1.el9.x86_64 155/189
削除中 : graphene-1.10.6-2.el9.x86_64 156/189
削除中 : gstreamer1-1.22.12-3.el9.x86_64 157/189
削除中 : opus-1.3.1-10.el9.x86_64 158/189
削除中 : orc-0.4.31-8.el9.x86_64 159/189
削除中 : libwayland-egl-1.21.0-1.el9.x86_64 160/189
削除中 : libstemmer-0-18.585svn.el9.x86_64 161/189
削除中 : exempi-2.6.0-0.2.20211007gite23c213.el9.x86_64 162/189
削除中 : libexif-0.6.22-6.el9.x86_64 163/189
削除中 : giflib-5.2.1-9.el9.x86_64 164/189
削除中 : libiptcdata-1.0.5-10.el9.x86_64 165/189
削除中 : totem-pl-parser-3.26.6-2.el9.x86_64 166/189
scriptletの実行中: upower-0.99.13-2.el9.x86_64 167/189
Removed "/etc/systemd/system/graphical.target.wants/upower.service".
削除中 : upower-0.99.13-2.el9.x86_64 167/189
scriptletの実行中: upower-0.99.13-2.el9.x86_64 167/189
削除中 : atk-2.36.0-5.el9.x86_64 168/189
削除中 : gsm-1.0.19-6.el9.x86_64 169/189
削除中 : libasyncns-0.8-22.el9.x86_64 170/189
削除中 : ModemManager-glib-1.20.2-1.el9.x86_64 171/189
scriptletの実行中: rtkit-0.11-29.el9.x86_64 172/189
Removed "/etc/systemd/system/graphical.target.wants/rtkit-daemon.service".
削除中 : rtkit-0.11-29.el9.x86_64 172/189
scriptletの実行中: rtkit-0.11-29.el9.x86_64 172/189
削除中 : bluez-libs-5.72-4.el9.x86_64 173/189
削除中 : fdk-aac-free-2.0.0-8.el9.x86_64 174/189
削除中 : libldac-2.0.2.3-10.el9.x86_64 175/189
削除中 : libsbc-1.4-9.el9.x86_64 176/189
削除中 : webrtc-audio-processing-0.3.1-8.el9.x86_64 177/189
scriptletの実行中: low-memory-monitor-2.1-4.el9.x86_64 178/189
Removed "/etc/systemd/system/basic.target.wants/low-memory-monitor.service".
削除中 : low-memory-monitor-2.1-4.el9.x86_64 178/189
scriptletの実行中: low-memory-monitor-2.1-4.el9.x86_64 178/189
削除中 : libepoxy-1.5.5-4.el9.x86_64 179/189
scriptletの実行中: dconf-0.40.0-6.el9.x86_64 180/189
The unit files have no installation config (WantedBy=, RequiredBy=, Also=,
Alias= settings in the [Install] section, and DefaultInstance= for template
units). This means they are not meant to be enabled or disabled using systemctl.
Possible reasons for having this kind of units are:
~ A unit may be statically enabled by being symlinked from another unit's
.wants/ or .requires/ directory.
~ A unit's purpose may be to act as a helper for some other unit which has
a requirement dependency on it.
~ A unit may be started when needed via activation (socket, path, timer,
D-Bus, udev, scripted systemctl call, ...).
~ In case of template units, the unit is meant to be enabled with some
instance name specified.
削除中 : dconf-0.40.0-6.el9.x86_64 180/189
scriptletの実行中: dconf-0.40.0-6.el9.x86_64 180/189
削除中 : libijs-0.35-15.el9.x86_64 181/189
削除中 : jbig2dec-libs-0.19-7.el9.x86_64 182/189
削除中 : libpaper-1.1.28-4.el9.x86_64 183/189
削除中 : liblqr-1-0.4.2-19.el9.x86_64 184/189
削除中 : libwmf-lite-0.2.12-10.el9.x86_64 185/189
削除中 : xdg-dbus-proxy-0.1.3-1.el9.x86_64 186/189
削除中 : bubblewrap-0.4.1-8.el9_5.x86_64 187/189
削除中 : flatpak-session-helper-1.12.9-4.el9_6.x86_64 188/189
削除中 : p11-kit-server-0.25.3-3.el9_5.x86_64 189/189
scriptletの実行中: p11-kit-server-0.25.3-3.el9_5.x86_64 189/189
検証中 : ImageMagick-libs-6.9.13.25-1.el9.x86_64 1/189
検証中 : LibRaw-0.21.1-1.el9.x86_64 2/189
検証中 : ModemManager-glib-1.20.2-1.el9.x86_64 3/189
検証中 : abattis-cantarell-fonts-0.301-4.el9.noarch 4/189
検証中 : adobe-mappings-cmap-20171205-12.el9.noarch 5/189
検証中 : adobe-mappings-cmap-deprecated-20171205-12.el9.noarch 6/189
検証中 : adobe-mappings-pdf-20180407-10.el9.noarch 7/189
検証中 : adobe-source-code-pro-fonts-2.030.1.050-12.el9.1.noarch 8/189
検証中 : adwaita-cursor-theme-40.1.1-3.el9.noarch 9/189
検証中 : adwaita-icon-theme-40.1.1-3.el9.noarch 10/189
検証中 : at-spi2-atk-2.38.0-4.el9.x86_64 11/189
検証中 : at-spi2-core-2.40.3-1.el9.x86_64 12/189
検証中 : atk-2.36.0-5.el9.x86_64 13/189
検証中 : avahi-glib-0.8-22.el9_6.x86_64 14/189
検証中 : avahi-libs-0.8-22.el9_6.x86_64 15/189
検証中 : bluez-libs-5.72-4.el9.x86_64 16/189
検証中 : bubblewrap-0.4.1-8.el9_5.x86_64 17/189
検証中 : cairo-1.17.4-7.el9.x86_64 18/189
検証中 : cairo-gobject-1.17.4-7.el9.x86_64 19/189
検証中 : colord-libs-1.4.5-6.el9_6.x86_64 20/189
検証中 : composefs-libs-1.0.8-1.el9.x86_64 21/189
検証中 : cups-libs-1:2.3.3op2-33.el9.x86_64 22/189
検証中 : dconf-0.40.0-6.el9.x86_64 23/189
検証中 : dejavu-sans-fonts-2.37-18.el9.noarch 24/189
検証中 : exempi-2.6.0-0.2.20211007gite23c213.el9.x86_64 25/189
検証中 : exiv2-0.27.5-2.el9.x86_64 26/189
検証中 : exiv2-libs-0.27.5-2.el9.x86_64 27/189
検証中 : fdk-aac-free-2.0.0-8.el9.x86_64 28/189
検証中 : flac-libs-1.3.3-10.el9_2.1.x86_64 29/189
検証中 : flatpak-1.12.9-4.el9_6.x86_64 30/189
検証中 : flatpak-selinux-1.12.9-4.el9_6.noarch 31/189
検証中 : flatpak-session-helper-1.12.9-4.el9_6.x86_64 32/189
検証中 : fontconfig-2.14.0-2.el9_1.x86_64 33/189
検証中 : fonts-filesystem-1:2.0.5-7.el9.1.noarch 34/189
検証中 : fribidi-1.0.10-6.el9.2.x86_64 35/189
検証中 : fuse-2.9.9-17.el9.x86_64 36/189
検証中 : fuse-common-3.10.2-9.el9.x86_64 37/189
検証中 : gd-2.3.2-3.el9.x86_64 38/189
検証中 : gdk-pixbuf2-2.42.6-4.el9_4.x86_64 39/189
検証中 : gdk-pixbuf2-modules-2.42.6-4.el9_4.x86_64 40/189
検証中 : geoclue2-2.6.0-8.el9_6.1.x86_64 41/189
検証中 : giflib-5.2.1-9.el9.x86_64 42/189
検証中 : glib-networking-2.68.3-3.el9.x86_64 43/189
検証中 : google-droid-sans-fonts-20200215-11.el9.2.noarch 44/189
検証中 : graphene-1.10.6-2.el9.x86_64 45/189
検証中 : graphviz-2.44.0-26.el9.x86_64 46/189
検証中 : gsettings-desktop-schemas-40.0-6.el9.x86_64 47/189
検証中 : gsm-1.0.19-6.el9.x86_64 48/189
検証中 : gstreamer1-1.22.12-3.el9.x86_64 49/189
検証中 : gstreamer1-plugins-base-1.22.12-4.el9.x86_64 50/189
検証中 : gtk-update-icon-cache-3.24.31-5.el9.x86_64 51/189
検証中 : gtk2-2.24.33-8.el9.x86_64 52/189
検証中 : gtk3-3.24.31-5.el9.x86_64 53/189
検証中 : hicolor-icon-theme-0.17-13.el9.noarch 54/189
検証中 : imath-3.1.2-1.el9.x86_64 55/189
検証中 : iso-codes-4.6.0-3.el9.noarch 56/189
検証中 : jasper-libs-2.0.28-3.el9.x86_64 57/189
検証中 : jbig2dec-libs-0.19-7.el9.x86_64 58/189
検証中 : jbigkit-libs-2.1-23.el9.x86_64 59/189
検証中 : langpacks-core-font-en-3.0-16.el9.noarch 60/189
検証中 : lcms2-2.12-3.el9.x86_64 61/189
検証中 : libICE-1.0.10-8.el9.x86_64 62/189
検証中 : libSM-1.2.3-10.el9.x86_64 63/189
検証中 : libX11-1.7.0-11.el9.x86_64 64/189
検証中 : libX11-common-1.7.0-11.el9.noarch 65/189
検証中 : libX11-xcb-1.7.0-11.el9.x86_64 66/189
検証中 : libXau-1.0.9-8.el9.x86_64 67/189
検証中 : libXaw-1.0.13-19.el9.x86_64 68/189
検証中 : libXcomposite-0.4.5-7.el9.x86_64 69/189
検証中 : libXcursor-1.2.0-7.el9.x86_64 70/189
検証中 : libXdamage-1.1.5-7.el9.x86_64 71/189
検証中 : libXext-1.3.4-8.el9.x86_64 72/189
検証中 : libXfixes-5.0.3-16.el9.x86_64 73/189
検証中 : libXft-2.3.3-8.el9.x86_64 74/189
検証中 : libXi-1.7.10-8.el9.x86_64 75/189
検証中 : libXinerama-1.1.4-10.el9.x86_64 76/189
検証中 : libXmu-1.1.3-8.el9.x86_64 77/189
検証中 : libXpm-3.5.13-10.el9.x86_64 78/189
検証中 : libXrandr-1.5.2-8.el9.x86_64 79/189
検証中 : libXrender-0.9.10-16.el9.x86_64 80/189
検証中 : libXt-1.2.0-6.el9.x86_64 81/189
検証中 : libXtst-1.2.3-16.el9.x86_64 82/189
検証中 : libXv-1.0.11-16.el9.x86_64 83/189
検証中 : libXxf86vm-1.1.4-18.el9.x86_64 84/189
検証中 : libappstream-glib-0.7.18-5.el9_4.x86_64 85/189
検証中 : libasyncns-0.8-22.el9.x86_64 86/189
検証中 : libatomic-11.5.0-5.el9_5.alma.1.x86_64 87/189
検証中 : libcanberra-0.30-27.el9.x86_64 88/189
検証中 : libcanberra-gtk2-0.30-27.el9.x86_64 89/189
検証中 : libcanberra-gtk3-0.30-27.el9.x86_64 90/189
検証中 : libdrm-2.4.123-2.el9.x86_64 91/189
検証中 : libepoxy-1.5.5-4.el9.x86_64 92/189
検証中 : libexif-0.6.22-6.el9.x86_64 93/189
検証中 : libfontenc-1.1.3-17.el9.x86_64 94/189
検証中 : libgexiv2-0.12.3-1.el9.x86_64 95/189
検証中 : libglvnd-1:1.3.4-1.el9.x86_64 96/189
検証中 : libglvnd-egl-1:1.3.4-1.el9.x86_64 97/189
検証中 : libglvnd-glx-1:1.3.4-1.el9.x86_64 98/189
検証中 : libgs-9.54.0-19.el9_6.x86_64 99/189
検証中 : libgsf-1.14.47-5.el9.x86_64 100/189
検証中 : libgxps-0.3.2-3.el9.x86_64 101/189
検証中 : libijs-0.35-15.el9.x86_64 102/189
検証中 : libiptcdata-1.0.5-10.el9.x86_64 103/189
検証中 : libjpeg-turbo-2.0.90-7.el9.x86_64 104/189
検証中 : libldac-2.0.2.3-10.el9.x86_64 105/189
検証中 : liblqr-1-0.4.2-19.el9.x86_64 106/189
検証中 : libnotify-0.7.9-8.el9.x86_64 107/189
検証中 : libogg-2:1.3.4-6.el9.x86_64 108/189
検証中 : libosinfo-1.10.0-1.el9.x86_64 109/189
検証中 : libpaper-1.1.28-4.el9.x86_64 110/189
検証中 : libpciaccess-0.16-7.el9.x86_64 111/189
検証中 : libproxy-0.4.15-35.el9.x86_64 112/189
検証中 : libproxy-webkitgtk4-0.4.15-35.el9.x86_64 113/189
検証中 : libraqm-0.8.0-1.el9.x86_64 114/189
検証中 : librsvg2-2.50.7-3.el9.x86_64 115/189
検証中 : libsbc-1.4-9.el9.x86_64 116/189
検証中 : libsndfile-1.0.31-9.el9.x86_64 117/189
検証中 : libsoup-2.72.0-10.el9_6.2.x86_64 118/189
検証中 : libstemmer-0-18.585svn.el9.x86_64 119/189
検証中 : libtheora-1:1.1.1-31.el9.x86_64 120/189
検証中 : libtiff-4.4.0-13.el9.x86_64 121/189
検証中 : libtracker-sparql-3.1.2-3.el9_1.x86_64 122/189
検証中 : libvorbis-1:1.3.7-5.el9.x86_64 123/189
検証中 : libwayland-client-1.21.0-1.el9.x86_64 124/189
検証中 : libwayland-cursor-1.21.0-1.el9.x86_64 125/189
検証中 : libwayland-egl-1.21.0-1.el9.x86_64 126/189
検証中 : libwayland-server-1.21.0-1.el9.x86_64 127/189
検証中 : libwebp-1.2.0-8.el9_3.x86_64 128/189
検証中 : libwmf-lite-0.2.12-10.el9.x86_64 129/189
検証中 : libxcb-1.13.1-9.el9.x86_64 130/189
検証中 : libxkbcommon-1.0.3-4.el9.x86_64 131/189
検証中 : libxshmfence-1.3-10.el9.x86_64 132/189
検証中 : low-memory-monitor-2.1-4.el9.x86_64 133/189
検証中 : mesa-dri-drivers-24.2.8-2.el9_6.alma.1.x86_64 134/189
検証中 : mesa-filesystem-24.2.8-2.el9_6.alma.1.x86_64 135/189
検証中 : mesa-libEGL-24.2.8-2.el9_6.alma.1.x86_64 136/189
検証中 : mesa-libGL-24.2.8-2.el9_6.alma.1.x86_64 137/189
検証中 : mesa-libgbm-24.2.8-2.el9_6.alma.1.x86_64 138/189
検証中 : mesa-libglapi-24.2.8-2.el9_6.alma.1.x86_64 139/189
検証中 : mkfontscale-1.2.1-3.el9.x86_64 140/189
検証中 : openexr-libs-3.1.1-3.el9.x86_64 141/189
検証中 : openjpeg2-2.4.0-8.el9.x86_64 142/189
検証中 : opus-1.3.1-10.el9.x86_64 143/189
検証中 : orc-0.4.31-8.el9.x86_64 144/189
検証中 : osinfo-db-20250124-2.el9_6.alma.2.noarch 145/189
検証中 : osinfo-db-tools-1.10.0-1.el9.x86_64 146/189
検証中 : ostree-libs-2025.1-1.el9.x86_64 147/189
検証中 : p11-kit-server-0.25.3-3.el9_5.x86_64 148/189
検証中 : pango-1.48.7-3.el9.x86_64 149/189
検証中 : php-pecl-imagick-3.7.0-1.el9.x86_64 150/189
検証中 : pipewire-1.0.1-1.el9.x86_64 151/189
検証中 : pipewire-alsa-1.0.1-1.el9.x86_64 152/189
検証中 : pipewire-jack-audio-connection-kit-1.0.1-1.el9.x86_64 153/189
検証中 : pipewire-jack-audio-connection-kit-libs-1.0.1-1.el9.x86_64 154/189
検証中 : pipewire-libs-1.0.1-1.el9.x86_64 155/189
検証中 : pipewire-pulseaudio-1.0.1-1.el9.x86_64 156/189
検証中 : pixman-0.40.0-6.el9_3.x86_64 157/189
検証中 : poppler-21.01.0-21.el9.x86_64 158/189
検証中 : poppler-data-0.4.9-9.el9.noarch 159/189
検証中 : poppler-glib-21.01.0-21.el9.x86_64 160/189
検証中 : pulseaudio-libs-15.0-3.el9.x86_64 161/189
検証中 : rtkit-0.11-29.el9.x86_64 162/189
検証中 : sound-theme-freedesktop-0.8-17.el9.noarch 163/189
検証中 : totem-pl-parser-3.26.6-2.el9.x86_64 164/189
検証中 : tracker-3.1.2-3.el9_1.x86_64 165/189
検証中 : tracker-miners-3.1.2-4.el9_3.x86_64 166/189
検証中 : upower-0.99.13-2.el9.x86_64 167/189
検証中 : urw-base35-bookman-fonts-20200910-6.el9.noarch 168/189
検証中 : urw-base35-c059-fonts-20200910-6.el9.noarch 169/189
検証中 : urw-base35-d050000l-fonts-20200910-6.el9.noarch 170/189
検証中 : urw-base35-fonts-20200910-6.el9.noarch 171/189
検証中 : urw-base35-fonts-common-20200910-6.el9.noarch 172/189
検証中 : urw-base35-gothic-fonts-20200910-6.el9.noarch 173/189
検証中 : urw-base35-nimbus-mono-ps-fonts-20200910-6.el9.noarch 174/189
検証中 : urw-base35-nimbus-roman-fonts-20200910-6.el9.noarch 175/189
検証中 : urw-base35-nimbus-sans-fonts-20200910-6.el9.noarch 176/189
検証中 : urw-base35-p052-fonts-20200910-6.el9.noarch 177/189
検証中 : urw-base35-standard-symbols-ps-fonts-20200910-6.el9.noarch 178/189
検証中 : urw-base35-z003-fonts-20200910-6.el9.noarch 179/189
検証中 : webkit2gtk3-jsc-2.48.3-1.el9_6.x86_64 180/189
検証中 : webrtc-audio-processing-0.3.1-8.el9.x86_64 181/189
検証中 : wireplumber-0.4.14-1.el9.x86_64 182/189
検証中 : wireplumber-libs-0.4.14-1.el9.x86_64 183/189
検証中 : xdg-dbus-proxy-0.1.3-1.el9.x86_64 184/189
検証中 : xdg-desktop-portal-1.12.6-1.el9.x86_64 185/189
検証中 : xdg-desktop-portal-gtk-1.12.0-3.el9.x86_64 186/189
検証中 : xkeyboard-config-2.33-2.el9.noarch 187/189
検証中 : xml-common-0.6.3-58.el9.noarch 188/189
検証中 : xorg-x11-fonts-ISO8859-1-100dpi-7.5-33.el9.noarch 189/189
削除しました:
ImageMagick-libs-6.9.13.25-1.el9.x86_64
LibRaw-0.21.1-1.el9.x86_64
ModemManager-glib-1.20.2-1.el9.x86_64
abattis-cantarell-fonts-0.301-4.el9.noarch
adobe-mappings-cmap-20171205-12.el9.noarch
adobe-mappings-cmap-deprecated-20171205-12.el9.noarch
adobe-mappings-pdf-20180407-10.el9.noarch
adobe-source-code-pro-fonts-2.030.1.050-12.el9.1.noarch
adwaita-cursor-theme-40.1.1-3.el9.noarch
adwaita-icon-theme-40.1.1-3.el9.noarch
at-spi2-atk-2.38.0-4.el9.x86_64
at-spi2-core-2.40.3-1.el9.x86_64
atk-2.36.0-5.el9.x86_64
avahi-glib-0.8-22.el9_6.x86_64
avahi-libs-0.8-22.el9_6.x86_64
bluez-libs-5.72-4.el9.x86_64
bubblewrap-0.4.1-8.el9_5.x86_64
cairo-1.17.4-7.el9.x86_64
cairo-gobject-1.17.4-7.el9.x86_64
colord-libs-1.4.5-6.el9_6.x86_64
composefs-libs-1.0.8-1.el9.x86_64
cups-libs-1:2.3.3op2-33.el9.x86_64
dconf-0.40.0-6.el9.x86_64
dejavu-sans-fonts-2.37-18.el9.noarch
exempi-2.6.0-0.2.20211007gite23c213.el9.x86_64
exiv2-0.27.5-2.el9.x86_64
exiv2-libs-0.27.5-2.el9.x86_64
fdk-aac-free-2.0.0-8.el9.x86_64
flac-libs-1.3.3-10.el9_2.1.x86_64
flatpak-1.12.9-4.el9_6.x86_64
flatpak-selinux-1.12.9-4.el9_6.noarch
flatpak-session-helper-1.12.9-4.el9_6.x86_64
fontconfig-2.14.0-2.el9_1.x86_64
fonts-filesystem-1:2.0.5-7.el9.1.noarch
fribidi-1.0.10-6.el9.2.x86_64
fuse-2.9.9-17.el9.x86_64
fuse-common-3.10.2-9.el9.x86_64
gd-2.3.2-3.el9.x86_64
gdk-pixbuf2-2.42.6-4.el9_4.x86_64
gdk-pixbuf2-modules-2.42.6-4.el9_4.x86_64
geoclue2-2.6.0-8.el9_6.1.x86_64
giflib-5.2.1-9.el9.x86_64
glib-networking-2.68.3-3.el9.x86_64
google-droid-sans-fonts-20200215-11.el9.2.noarch
graphene-1.10.6-2.el9.x86_64
graphviz-2.44.0-26.el9.x86_64
gsettings-desktop-schemas-40.0-6.el9.x86_64
gsm-1.0.19-6.el9.x86_64
gstreamer1-1.22.12-3.el9.x86_64
gstreamer1-plugins-base-1.22.12-4.el9.x86_64
gtk-update-icon-cache-3.24.31-5.el9.x86_64
gtk2-2.24.33-8.el9.x86_64
gtk3-3.24.31-5.el9.x86_64
hicolor-icon-theme-0.17-13.el9.noarch
imath-3.1.2-1.el9.x86_64
iso-codes-4.6.0-3.el9.noarch
jasper-libs-2.0.28-3.el9.x86_64
jbig2dec-libs-0.19-7.el9.x86_64
jbigkit-libs-2.1-23.el9.x86_64
langpacks-core-font-en-3.0-16.el9.noarch
lcms2-2.12-3.el9.x86_64
libICE-1.0.10-8.el9.x86_64
libSM-1.2.3-10.el9.x86_64
libX11-1.7.0-11.el9.x86_64
libX11-common-1.7.0-11.el9.noarch
libX11-xcb-1.7.0-11.el9.x86_64
libXau-1.0.9-8.el9.x86_64
libXaw-1.0.13-19.el9.x86_64
libXcomposite-0.4.5-7.el9.x86_64
libXcursor-1.2.0-7.el9.x86_64
libXdamage-1.1.5-7.el9.x86_64
libXext-1.3.4-8.el9.x86_64
libXfixes-5.0.3-16.el9.x86_64
libXft-2.3.3-8.el9.x86_64
libXi-1.7.10-8.el9.x86_64
libXinerama-1.1.4-10.el9.x86_64
libXmu-1.1.3-8.el9.x86_64
libXpm-3.5.13-10.el9.x86_64
libXrandr-1.5.2-8.el9.x86_64
libXrender-0.9.10-16.el9.x86_64
libXt-1.2.0-6.el9.x86_64
libXtst-1.2.3-16.el9.x86_64
libXv-1.0.11-16.el9.x86_64
libXxf86vm-1.1.4-18.el9.x86_64
libappstream-glib-0.7.18-5.el9_4.x86_64
libasyncns-0.8-22.el9.x86_64
libatomic-11.5.0-5.el9_5.alma.1.x86_64
libcanberra-0.30-27.el9.x86_64
libcanberra-gtk2-0.30-27.el9.x86_64
libcanberra-gtk3-0.30-27.el9.x86_64
libdrm-2.4.123-2.el9.x86_64
libepoxy-1.5.5-4.el9.x86_64
libexif-0.6.22-6.el9.x86_64
libfontenc-1.1.3-17.el9.x86_64
libgexiv2-0.12.3-1.el9.x86_64
libglvnd-1:1.3.4-1.el9.x86_64
libglvnd-egl-1:1.3.4-1.el9.x86_64
libglvnd-glx-1:1.3.4-1.el9.x86_64
libgs-9.54.0-19.el9_6.x86_64
libgsf-1.14.47-5.el9.x86_64
libgxps-0.3.2-3.el9.x86_64
libijs-0.35-15.el9.x86_64
libiptcdata-1.0.5-10.el9.x86_64
libjpeg-turbo-2.0.90-7.el9.x86_64
libldac-2.0.2.3-10.el9.x86_64
liblqr-1-0.4.2-19.el9.x86_64
libnotify-0.7.9-8.el9.x86_64
libogg-2:1.3.4-6.el9.x86_64
libosinfo-1.10.0-1.el9.x86_64
libpaper-1.1.28-4.el9.x86_64
libpciaccess-0.16-7.el9.x86_64
libproxy-0.4.15-35.el9.x86_64
libproxy-webkitgtk4-0.4.15-35.el9.x86_64
libraqm-0.8.0-1.el9.x86_64
librsvg2-2.50.7-3.el9.x86_64
libsbc-1.4-9.el9.x86_64
libsndfile-1.0.31-9.el9.x86_64
libsoup-2.72.0-10.el9_6.2.x86_64
libstemmer-0-18.585svn.el9.x86_64
libtheora-1:1.1.1-31.el9.x86_64
libtiff-4.4.0-13.el9.x86_64
libtracker-sparql-3.1.2-3.el9_1.x86_64
libvorbis-1:1.3.7-5.el9.x86_64
libwayland-client-1.21.0-1.el9.x86_64
libwayland-cursor-1.21.0-1.el9.x86_64
libwayland-egl-1.21.0-1.el9.x86_64
libwayland-server-1.21.0-1.el9.x86_64
libwebp-1.2.0-8.el9_3.x86_64
libwmf-lite-0.2.12-10.el9.x86_64
libxcb-1.13.1-9.el9.x86_64
libxkbcommon-1.0.3-4.el9.x86_64
libxshmfence-1.3-10.el9.x86_64
low-memory-monitor-2.1-4.el9.x86_64
mesa-dri-drivers-24.2.8-2.el9_6.alma.1.x86_64
mesa-filesystem-24.2.8-2.el9_6.alma.1.x86_64
mesa-libEGL-24.2.8-2.el9_6.alma.1.x86_64
mesa-libGL-24.2.8-2.el9_6.alma.1.x86_64
mesa-libgbm-24.2.8-2.el9_6.alma.1.x86_64
mesa-libglapi-24.2.8-2.el9_6.alma.1.x86_64
mkfontscale-1.2.1-3.el9.x86_64
openexr-libs-3.1.1-3.el9.x86_64
openjpeg2-2.4.0-8.el9.x86_64
opus-1.3.1-10.el9.x86_64
orc-0.4.31-8.el9.x86_64
osinfo-db-20250124-2.el9_6.alma.2.noarch
osinfo-db-tools-1.10.0-1.el9.x86_64
ostree-libs-2025.1-1.el9.x86_64
p11-kit-server-0.25.3-3.el9_5.x86_64
pango-1.48.7-3.el9.x86_64
php-pecl-imagick-3.7.0-1.el9.x86_64
pipewire-1.0.1-1.el9.x86_64
pipewire-alsa-1.0.1-1.el9.x86_64
pipewire-jack-audio-connection-kit-1.0.1-1.el9.x86_64
pipewire-jack-audio-connection-kit-libs-1.0.1-1.el9.x86_64
pipewire-libs-1.0.1-1.el9.x86_64
pipewire-pulseaudio-1.0.1-1.el9.x86_64
pixman-0.40.0-6.el9_3.x86_64
poppler-21.01.0-21.el9.x86_64
poppler-data-0.4.9-9.el9.noarch
poppler-glib-21.01.0-21.el9.x86_64
pulseaudio-libs-15.0-3.el9.x86_64
rtkit-0.11-29.el9.x86_64
sound-theme-freedesktop-0.8-17.el9.noarch
totem-pl-parser-3.26.6-2.el9.x86_64
tracker-3.1.2-3.el9_1.x86_64
tracker-miners-3.1.2-4.el9_3.x86_64
upower-0.99.13-2.el9.x86_64
urw-base35-bookman-fonts-20200910-6.el9.noarch
urw-base35-c059-fonts-20200910-6.el9.noarch
urw-base35-d050000l-fonts-20200910-6.el9.noarch
urw-base35-fonts-20200910-6.el9.noarch
urw-base35-fonts-common-20200910-6.el9.noarch
urw-base35-gothic-fonts-20200910-6.el9.noarch
urw-base35-nimbus-mono-ps-fonts-20200910-6.el9.noarch
urw-base35-nimbus-roman-fonts-20200910-6.el9.noarch
urw-base35-nimbus-sans-fonts-20200910-6.el9.noarch
urw-base35-p052-fonts-20200910-6.el9.noarch
urw-base35-standard-symbols-ps-fonts-20200910-6.el9.noarch
urw-base35-z003-fonts-20200910-6.el9.noarch
webkit2gtk3-jsc-2.48.3-1.el9_6.x86_64
webrtc-audio-processing-0.3.1-8.el9.x86_64
wireplumber-0.4.14-1.el9.x86_64
wireplumber-libs-0.4.14-1.el9.x86_64
xdg-dbus-proxy-0.1.3-1.el9.x86_64
xdg-desktop-portal-1.12.6-1.el9.x86_64
xdg-desktop-portal-gtk-1.12.0-3.el9.x86_64
xkeyboard-config-2.33-2.el9.noarch
xml-common-0.6.3-58.el9.noarch
xorg-x11-fonts-ISO8859-1-100dpi-7.5-33.el9.noarch
完了しました!
$
この後再度、dnf module switch-to php:8.3 を実行して切り替えに成功しました
$ sudo dnf module switch-to php:8.3
メタデータの期限切れの最終確認: 2:41:59 前の 2025年07月16日 07時18分53秒 に実施しました。
依存関係が解決しました。
===========================================================================================================
パッケージ Arch バージョン リポジトリー サイズ
===========================================================================================================
アップグレード:
php x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 7.8 k
php-cli x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 3.7 M
php-common x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 706 k
php-fpm x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 1.9 M
php-intl x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 167 k
php-mbstring x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 524 k
php-mysqlnd x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 144 k
php-opcache x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 353 k
php-pdo x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 86 k
php-pecl-zip x86_64 1.22.3-1.module_el9.6.0+151+5f31e576 appstream 57 k
php-xml x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 150 k
依存関係のインストール:
capstone x86_64 4.0.2-10.el9 appstream 766 k
モジュールストリームの有効化中:
php 8.3
トランザクションの概要
===========================================================================================================
インストール 1 パッケージ
アップグレード 11 パッケージ
ダウンロードサイズの合計: 8.5 M
これでよろしいですか? [y/N]: y
パッケージのダウンロード:
(1/12): php-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 86 kB/s | 7.8 kB 00:00
(2/12): capstone-4.0.2-10.el9.x86_64.rpm 3.1 MB/s | 766 kB 00:00
(3/12): php-common-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 2.8 MB/s | 706 kB 00:00
(4/12): php-intl-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 2.0 MB/s | 167 kB 00:00
(5/12): php-mbstring-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 2.5 MB/s | 524 kB 00:00
(6/12): php-mysqlnd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 2.2 MB/s | 144 kB 00:00
(7/12): php-fpm-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 3.8 MB/s | 1.9 MB 00:00
(8/12): php-opcache-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 2.7 MB/s | 353 kB 00:00
(9/12): php-pdo-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 1.1 MB/s | 86 kB 00:00
(10/12): php-pecl-zip-1.22.3-1.module_el9.6.0+151+5f31e576.x86_64.rpm 1.5 MB/s | 57 kB 00:00
(11/12): php-xml-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 1.5 MB/s | 150 kB 00:00
(12/12): php-cli-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 4.0 MB/s | 3.7 MB 00:00
-----------------------------------------------------------------------------------------------------------
合計 5.7 MB/s | 8.5 MB 00:01
トランザクションを確認しています
トランザクションの確認に成功しました。
トランザクションをテストしています
トランザクションのテストに成功しました。
トランザクションを実行しています
準備中 : 1/1
アップグレード中 : php-common-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 1/23
アップグレード中 : php-pdo-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 2/23
アップグレード中 : php-cli-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 3/23
アップグレード中 : php-fpm-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 4/23
scriptletの実行中: php-fpm-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 4/23
アップグレード中 : php-mbstring-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 5/23
アップグレード中 : php-xml-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 6/23
インストール中 : capstone-4.0.2-10.el9.x86_64 7/23
アップグレード中 : php-opcache-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 8/23
アップグレード中 : php-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 9/23
アップグレード中 : php-mysqlnd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 10/23
アップグレード中 : php-intl-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 11/23
アップグレード中 : php-pecl-zip-1.22.3-1.module_el9.6.0+151+5f31e576.x86_64 12/23
整理 : php-8.0.30-3.el9_6.x86_64 13/23
整理 : php-pecl-zip-1.19.2-6.el9.x86_64 14/23
整理 : php-cli-8.0.30-3.el9_6.x86_64 15/23
scriptletの実行中: php-fpm-8.0.30-3.el9_6.x86_64 16/23
整理 : php-fpm-8.0.30-3.el9_6.x86_64 16/23
整理 : php-mbstring-8.0.30-3.el9_6.x86_64 17/23
整理 : php-opcache-8.0.30-3.el9_6.x86_64 18/23
整理 : php-xml-8.0.30-3.el9_6.x86_64 19/23
整理 : php-mysqlnd-8.0.30-3.el9_6.x86_64 20/23
整理 : php-pdo-8.0.30-3.el9_6.x86_64 21/23
整理 : php-intl-8.0.30-3.el9_6.x86_64 22/23
整理 : php-common-8.0.30-3.el9_6.x86_64 23/23
scriptletの実行中: php-common-8.0.30-3.el9_6.x86_64 23/23
検証中 : capstone-4.0.2-10.el9.x86_64 1/23
検証中 : php-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 2/23
検証中 : php-8.0.30-3.el9_6.x86_64 3/23
検証中 : php-cli-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 4/23
検証中 : php-cli-8.0.30-3.el9_6.x86_64 5/23
検証中 : php-common-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 6/23
検証中 : php-common-8.0.30-3.el9_6.x86_64 7/23
検証中 : php-fpm-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 8/23
検証中 : php-fpm-8.0.30-3.el9_6.x86_64 9/23
検証中 : php-intl-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 10/23
検証中 : php-intl-8.0.30-3.el9_6.x86_64 11/23
検証中 : php-mbstring-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 12/23
検証中 : php-mbstring-8.0.30-3.el9_6.x86_64 13/23
検証中 : php-mysqlnd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 14/23
検証中 : php-mysqlnd-8.0.30-3.el9_6.x86_64 15/23
検証中 : php-opcache-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 16/23
検証中 : php-opcache-8.0.30-3.el9_6.x86_64 17/23
検証中 : php-pdo-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 18/23
検証中 : php-pdo-8.0.30-3.el9_6.x86_64 19/23
検証中 : php-pecl-zip-1.22.3-1.module_el9.6.0+151+5f31e576.x86_64 20/23
検証中 : php-pecl-zip-1.19.2-6.el9.x86_64 21/23
検証中 : php-xml-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 22/23
検証中 : php-xml-8.0.30-3.el9_6.x86_64 23/23
アップグレード済み:
php-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-cli-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-common-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-fpm-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-intl-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-mbstring-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-mysqlnd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-opcache-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-pdo-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
php-pecl-zip-1.22.3-1.module_el9.6.0+151+5f31e576.x86_64
php-xml-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
インストール済み:
capstone-4.0.2-10.el9.x86_64
完了しました!
$
で・・・削除した php-pecl-imagick はインストールできるかな?と試してみましたが、やっぱりだめでした
$ sudo dnf install php-pecl-imagick
メタデータの期限切れの最終確認: 2:43:35 前の 2025年07月16日 07時18分53秒 に実施しました。
エラー:
問題: package php-pecl-imagick-3.7.0-1.el9.x86_64 from epel requires php(api) = 20200930-64, but none of the providers can be installed
- package php-pecl-imagick-3.7.0-1.el9.x86_64 from epel requires php(zend-abi) = 20200930-64, but none of the providers can be installed
- 競合するリクエスト
- package php-common-8.0.30-3.el9_6.x86_64 from appstream is filtered out by modular filtering
(インストール不可のパッケージをスキップするには、'--skip-broken' を追加してみてください または、'--nobest' を追加して、最適候補のパッケージのみを使用しないでください)
$
2025/07/18追記
あれ??エディッタで直接画像を貼り付けようとすると「Webサーバーはこの画像に対してレスポンシブな画像サイズを生成できません。アップロードする前にJPEGまたはPNGに変換してください。」と表示されるようになった

今回の対応中にgdに関するパッケージが消されていたためだた。
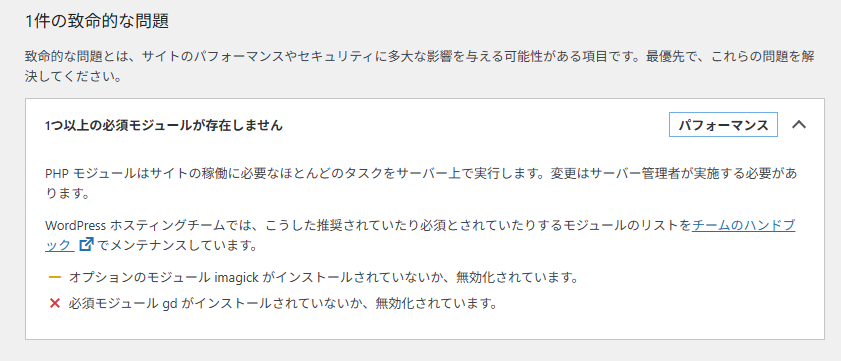
必要なのは php-gdでした。
最初 gdだけかと思ってdnf install gdでインストールしたら状況が変わらなかったので「dnf install gd php-gd」が正解でした。
# dnf install gd
メタデータの期限切れの最終確認: 0:27:57 前の 2025年07月19日 18時14分35秒 に実施しました。
依存関係が解決しました。
==========================================================================================================================================
パッケージ アーキテクチャー バージョン リポジトリー サイズ
==========================================================================================================================================
インストール:
gd x86_64 2.3.2-3.el9 appstream 131 k
依存関係のインストール:
dejavu-sans-fonts noarch 2.37-18.el9 baseos 1.3 M
fontconfig x86_64 2.14.0-2.el9_1 appstream 274 k
fonts-filesystem noarch 1:2.0.5-7.el9.1 baseos 9.0 k
jbigkit-libs x86_64 2.1-23.el9 appstream 52 k
langpacks-core-font-en noarch 3.0-16.el9 appstream 9.4 k
libX11 x86_64 1.7.0-11.el9 appstream 646 k
libX11-common noarch 1.7.0-11.el9 appstream 151 k
libXau x86_64 1.0.9-8.el9 appstream 30 k
libXpm x86_64 3.5.13-10.el9 appstream 57 k
libjpeg-turbo x86_64 2.0.90-7.el9 appstream 174 k
libtiff x86_64 4.4.0-13.el9 appstream 197 k
libwebp x86_64 1.2.0-8.el9_3 appstream 276 k
libxcb x86_64 1.13.1-9.el9 appstream 225 k
xml-common noarch 0.6.3-58.el9 appstream 31 k
トランザクションの概要
==========================================================================================================================================
インストール 15 パッケージ
ダウンロードサイズの合計: 3.5 M
インストール後のサイズ: 13 M
これでよろしいですか? [y/N]: y
パッケージのダウンロード:
(1/15): jbigkit-libs-2.1-23.el9.x86_64.rpm 123 kB/s | 52 kB 00:00
(2/15): gd-2.3.2-3.el9.x86_64.rpm 309 kB/s | 131 kB 00:00
(3/15): langpacks-core-font-en-3.0-16.el9.noarch.rpm 257 kB/s | 9.4 kB 00:00
(4/15): fontconfig-2.14.0-2.el9_1.x86_64.rpm 555 kB/s | 274 kB 00:00
(5/15): libXau-1.0.9-8.el9.x86_64.rpm 389 kB/s | 30 kB 00:00
(6/15): libX11-common-1.7.0-11.el9.noarch.rpm 1.2 MB/s | 151 kB 00:00
(7/15): libX11-1.7.0-11.el9.x86_64.rpm 3.7 MB/s | 646 kB 00:00
(8/15): libXpm-3.5.13-10.el9.x86_64.rpm 1.3 MB/s | 57 kB 00:00
(9/15): libjpeg-turbo-2.0.90-7.el9.x86_64.rpm 1.9 MB/s | 174 kB 00:00
(10/15): libtiff-4.4.0-13.el9.x86_64.rpm 2.0 MB/s | 197 kB 00:00
(11/15): libwebp-1.2.0-8.el9_3.x86_64.rpm 2.8 MB/s | 276 kB 00:00
(12/15): xml-common-0.6.3-58.el9.noarch.rpm 715 kB/s | 31 kB 00:00
(13/15): libxcb-1.13.1-9.el9.x86_64.rpm 2.4 MB/s | 225 kB 00:00
(14/15): fonts-filesystem-2.0.5-7.el9.1.noarch.rpm 136 kB/s | 9.0 kB 00:00
(15/15): dejavu-sans-fonts-2.37-18.el9.noarch.rpm 4.4 MB/s | 1.3 MB 00:00
------------------------------------------------------------------------------------------------------------------------------------------
合計 1.5 MB/s | 3.5 MB 00:02
トランザクションを確認しています
トランザクションの確認に成功しました。
トランザクションをテストしています
トランザクションのテストに成功しました。
トランザクションを実行しています
準備中 : 1/1
インストール中 : fonts-filesystem-1:2.0.5-7.el9.1.noarch 1/15
インストール中 : dejavu-sans-fonts-2.37-18.el9.noarch 2/15
インストール中 : libwebp-1.2.0-8.el9_3.x86_64 3/15
インストール中 : libjpeg-turbo-2.0.90-7.el9.x86_64 4/15
インストール中 : langpacks-core-font-en-3.0-16.el9.noarch 5/15
scriptletの実行中: xml-common-0.6.3-58.el9.noarch 6/15
インストール中 : xml-common-0.6.3-58.el9.noarch 6/15
インストール中 : fontconfig-2.14.0-2.el9_1.x86_64 7/15
scriptletの実行中: fontconfig-2.14.0-2.el9_1.x86_64 7/15
インストール中 : libXau-1.0.9-8.el9.x86_64 8/15
インストール中 : libxcb-1.13.1-9.el9.x86_64 9/15
インストール中 : libX11-common-1.7.0-11.el9.noarch 10/15
インストール中 : libX11-1.7.0-11.el9.x86_64 11/15
インストール中 : libXpm-3.5.13-10.el9.x86_64 12/15
インストール中 : jbigkit-libs-2.1-23.el9.x86_64 13/15
インストール中 : libtiff-4.4.0-13.el9.x86_64 14/15
インストール中 : gd-2.3.2-3.el9.x86_64 15/15
scriptletの実行中: fontconfig-2.14.0-2.el9_1.x86_64 15/15
scriptletの実行中: gd-2.3.2-3.el9.x86_64 15/15
検証中 : fontconfig-2.14.0-2.el9_1.x86_64 1/15
検証中 : gd-2.3.2-3.el9.x86_64 2/15
検証中 : jbigkit-libs-2.1-23.el9.x86_64 3/15
検証中 : langpacks-core-font-en-3.0-16.el9.noarch 4/15
検証中 : libX11-1.7.0-11.el9.x86_64 5/15
検証中 : libX11-common-1.7.0-11.el9.noarch 6/15
検証中 : libXau-1.0.9-8.el9.x86_64 7/15
検証中 : libXpm-3.5.13-10.el9.x86_64 8/15
検証中 : libjpeg-turbo-2.0.90-7.el9.x86_64 9/15
検証中 : libtiff-4.4.0-13.el9.x86_64 10/15
検証中 : libwebp-1.2.0-8.el9_3.x86_64 11/15
検証中 : libxcb-1.13.1-9.el9.x86_64 12/15
検証中 : xml-common-0.6.3-58.el9.noarch 13/15
検証中 : dejavu-sans-fonts-2.37-18.el9.noarch 14/15
検証中 : fonts-filesystem-1:2.0.5-7.el9.1.noarch 15/15
インストール済み:
dejavu-sans-fonts-2.37-18.el9.noarch fontconfig-2.14.0-2.el9_1.x86_64 fonts-filesystem-1:2.0.5-7.el9.1.noarch
gd-2.3.2-3.el9.x86_64 jbigkit-libs-2.1-23.el9.x86_64 langpacks-core-font-en-3.0-16.el9.noarch
libX11-1.7.0-11.el9.x86_64 libX11-common-1.7.0-11.el9.noarch libXau-1.0.9-8.el9.x86_64
libXpm-3.5.13-10.el9.x86_64 libjpeg-turbo-2.0.90-7.el9.x86_64 libtiff-4.4.0-13.el9.x86_64
libwebp-1.2.0-8.el9_3.x86_64 libxcb-1.13.1-9.el9.x86_64 xml-common-0.6.3-58.el9.noarch
完了しました!
# dnf install php-gd
メタデータの期限切れの最終確認: 0:29:07 前の 2025年07月19日 18時14分35秒 に実施しました。
依存関係が解決しました。
==========================================================================================================================================
パッケージ アーキテクチャー バージョン リポジトリー サイズ
==========================================================================================================================================
インストール:
php-gd x86_64 8.3.19-1.module_el9.6.0+166+f262c21c appstream 40 k
トランザクションの概要
==========================================================================================================================================
インストール 1 パッケージ
ダウンロードサイズの合計: 40 k
インストール後のサイズ: 113 k
これでよろしいですか? [y/N]: y
パッケージのダウンロード:
php-gd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64.rpm 361 kB/s | 40 kB 00:00
------------------------------------------------------------------------------------------------------------------------------------------
合計 55 kB/s | 40 kB 00:00
トランザクションを確認しています
トランザクションの確認に成功しました。
トランザクションをテストしています
トランザクションのテストに成功しました。
トランザクションを実行しています
準備中 : 1/1
インストール中 : php-gd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 1/1
scriptletの実行中: php-gd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 1/1
検証中 : php-gd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64 1/1
インストール済み:
php-gd-8.3.19-1.module_el9.6.0+166+f262c21c.x86_64
完了しました!
#
HPE G3 KVMコンソールスイッチ AF652A を使う際に、汎用品の液晶、キーボード、マウスをつなげたところ、マウスが認識できない
よく同じ1Uに配置するので実質一体型として扱われているLCD8500のタッチパッドはちゃんと動くが、その前面ポートに別のUSBマウスをつないでも動かない。
なんでかなぁ、と思っていたら、ATENのWebにヒントを発見
「マウスが相性問題で動かない(マウスエミュレーション対応KVM製品全般)」→「マウス・キーボード入力が快適に反応しない(KVM製品全般)」
重要な記載はこれ
・USB1.1デバイスであること
・内部機構にUSBハブがなく、1つのUSB HID入力デバイスとして認識されること
・マウスの場合、ポーリングレートが125Hzであること (DPI400が好ましい)
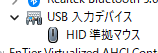
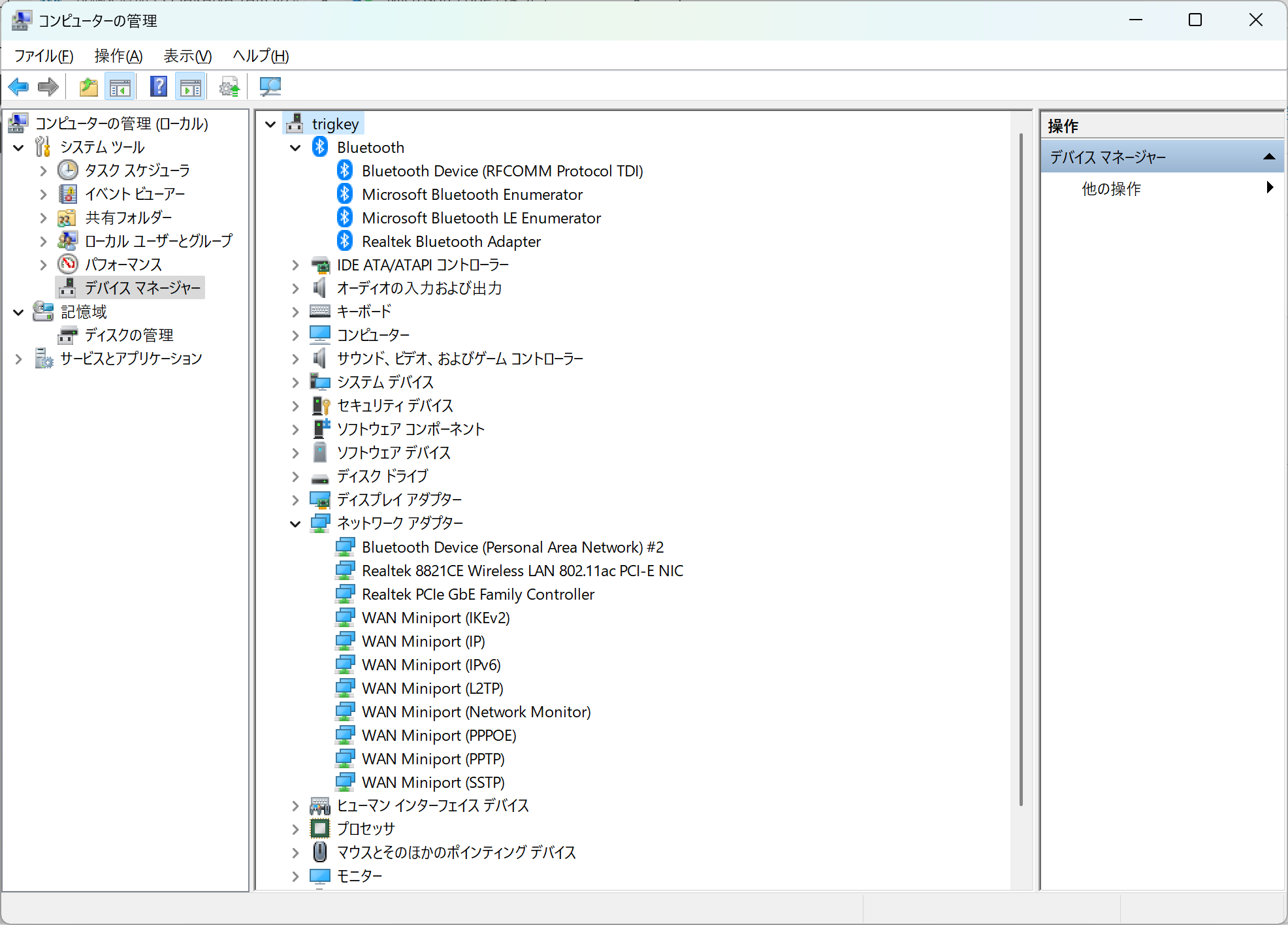
つなごうとして認識しなかったマウスは logi M170 ワイヤレスマウスで、普通につないだときのデバイス認識を確認すると、以下のようにHID準拠マウス以外のデバイスが認知されている。
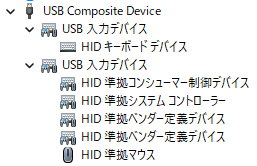
ちょうど持ってきていた偽M650マウスもやはり認識しなかった

では認識するマウスは・・・と探したら、古いやつだった
まずはセリアあたりで買った500円マウス
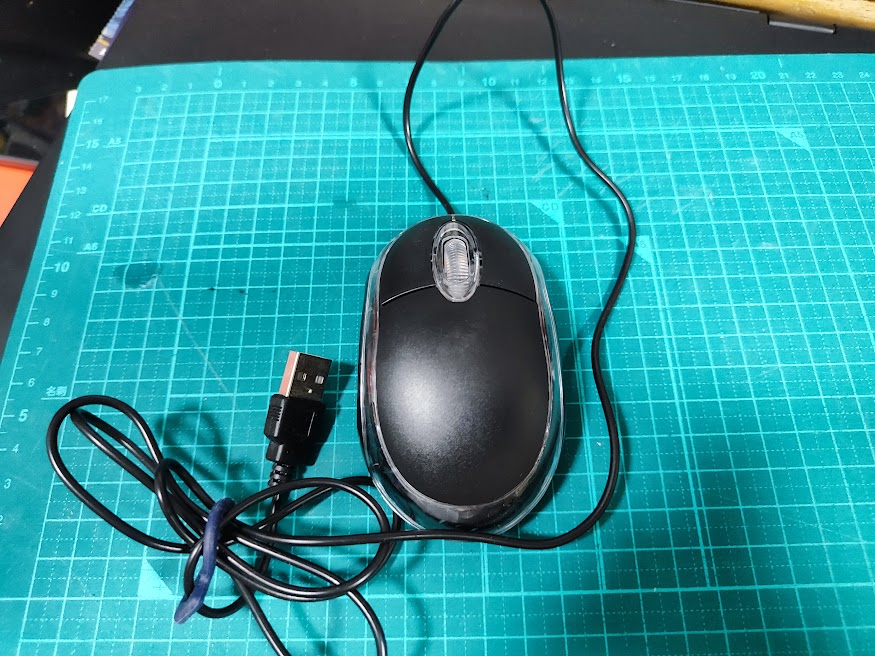
バッファローの古い有線マウスで、デバイス認識は↑と同じ

これらのマウスをAF652Aに指してみたところ、どれも問題なく稼働しました。
All FlashのnetApp AFF C250は通常2つあるノードに対して均等にディスクが割り当てられている。
ONTAP公式ドキュメント:ルート/データパーティショニング
例えば15TB SSDを10本つんでいる場合、以下のようになる

各スロットにある15TB SSDは内部で、data1パーテーション(約7TB)、data2パーテーション(約7TB)、rootパーテーション(残り) に分割されるという、ADPv2というフォーマットになっている。
オレンジ色の部分のownerがノード1で、水色の部分のownerがノード2となる。
data1パーテーションとdata2パーテーションのownerをノード1に割り当てなおすと以下のような構成をとることが可能となり、ボリュームを拡大することができる。

owner変更してノード1側に集約しよう、という場合は、ノード2側に作成されているaggregateは壊す必要があるので注意
パーテーション変更を行う際に、owner状態などを確認する必要がある。
その際に使うコマンドには、通常権限(admin)で実行できるものと、diag権限で実行できるものがある。
通常権限コマンド「storage disk show -partition-ownership」
通常権限コマンド「storage disk show -fields owner,type,root-owner,data1-owner,data2-owner」
diag権限コマンド「storage disk partition show」
パーテーションの割り当てを変更するときに、変更忘れがないか確認する場合は「storage disk partition show -partition *P2」パーテーションを指定してOwnerノードの表示を一括で確認するとよい
パーテーションownerを変更するコマンドはdiag権限の「storage disk partition assign」で行う
「storage disk partition assign -partition *P2 -owner ノード1 -force」と実行すると有無も言わさず強制的にすべてのP2パーテーション(data2パーテーション)のownerをノード1に変更することができるが、事故を起こさないように事前に「storage disk partition show -partition *P2」を実行し、すべての”Container Type”が「spare」であることを確認した方がよい
すでに両ノードでaggregateが作成されている場合、ownerをはく奪するノード側のaggregateを削除する必要がある。
なお、システム用のaggregate(標準ではaggr0_ノード名 で作成されている) は削除しないこと。
削除手順は「storage aggregate offline -aggregate aggr名」でオフラインにした後
「storage aggregate delete -aggregate aggr名」で削除する。
15TB SSDが8本の場合、各ノードのrootパーテーション部分は4パーテーションを使用したRAID-DPとなりスペアはない状態となる。
各ノードが使うシステム用aggregateは140GB程度は確保されるのだが、ディスクの本数が少ない場合、rootパーテーションに割り当てられる容量が通常より増やされれていた。
| data1 | data2 | root | rootのスペア | |
| 8本 | 6.94TB | 6.94TB | 93.52GB | なし |
| 10本 | 6.94TB | 6.94TB | 93.52GB | 1 |
| 12本 | 6.96TB | 6.96TB | 62.35GB | 1 |
| 14本 | 6.96TB | 6.96TB | 62.35GB | 1 |
| 16本~22本 | 6.97TB | 6.97TB | 37.42GB | 1 |
| 24本 | 6.97TB | 6.97TB | 37.42GB | 2 |
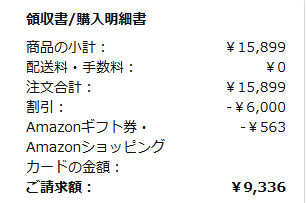
AmazonでTRIGKEYのミニPCが1万円を切ってる、というので買ってみた
15899円になぜか6000円引きのクーポンがついてきて、1万円を切ってるというもの
速やかに到着・・・

なぜか箱をくるんでいるビニールに対して技適 210-173540 というシールが貼れているという・・・

箱の中身はこんな感じ

電源ユニット内蔵なので、謎のType-C形状電源とか不要でコンパクトに使える、というのがとても良いですね

ついでに中身確認
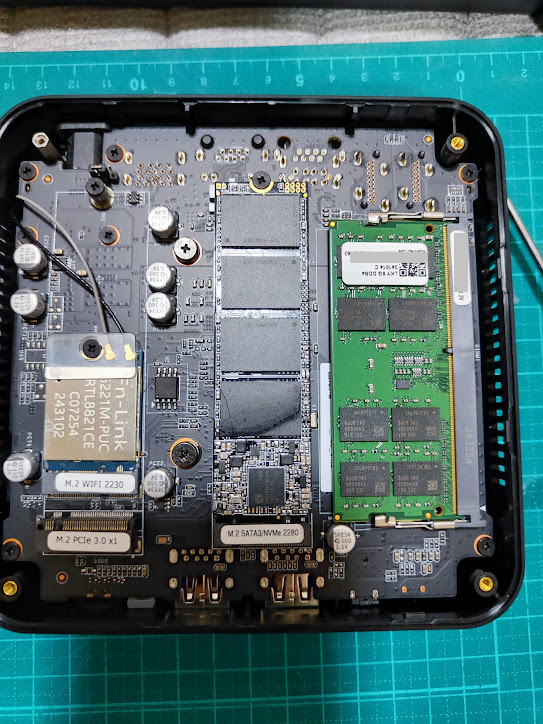
うーん・・・M.2 SATA SSD 256GBが黒いです。
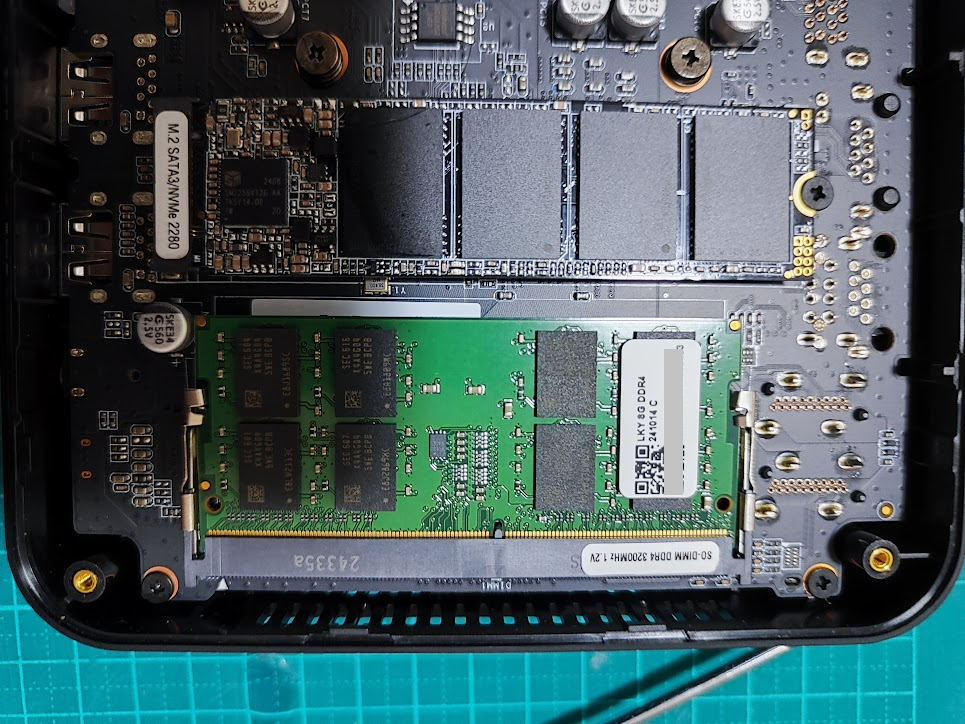
フラッシュチップの記載が何も読めません

メモリにもかかれている「LKY」というのがメーカか何かなんですかね?
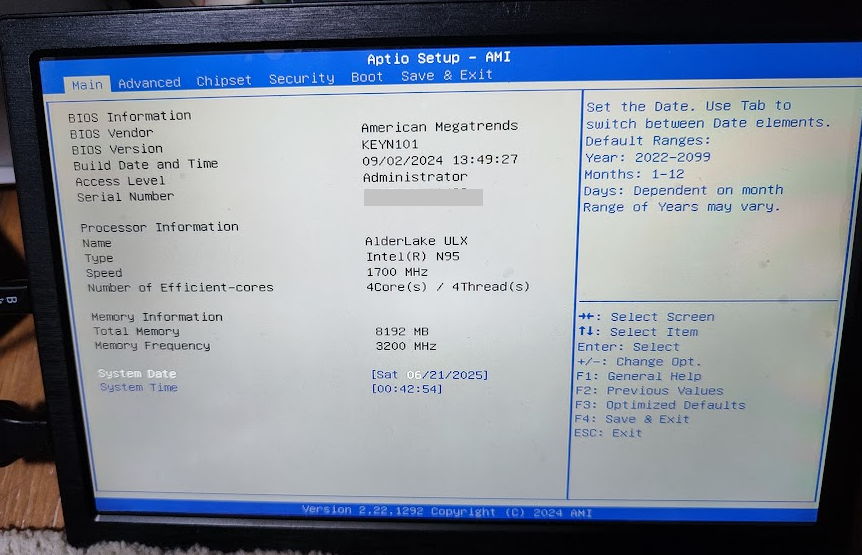
起動してみましょう
F2キーでUEFIに入れました。
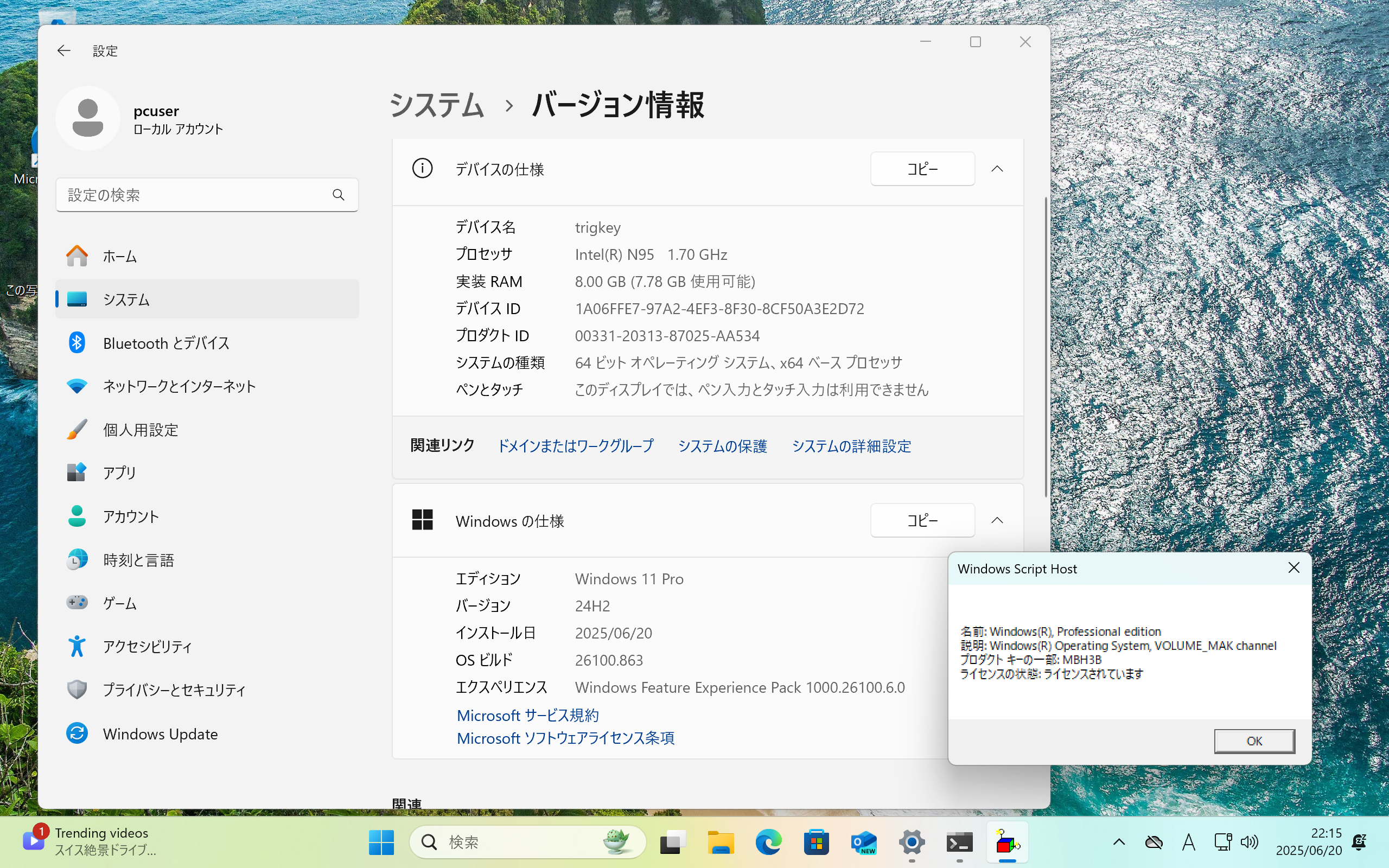
プレインストールのWindows 11 Proのセットアップを進めていって「slmgr /dli」を実行してWindowsのライセンス認識を確認してみます・・・
ライセンスは以下のようにVOLUME_MAKでした
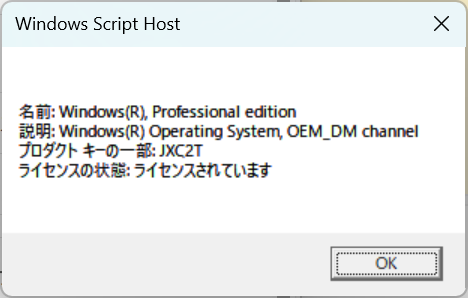
なので、Amazon経由で正式なライセンスをくれ、とメッセージを送ったところ4営業日でライセンスが発行され、適用したところ OEM_DM として認識されることを確認しました。
で・・・実は、なかなかライセンスが来なかったので、ライセンスが届く前にWindowsの再インストールを行ってみたところ予想外の事態が・・・
インストール時にライセンスは自動認識されないので、Windows 11 Proを手動で選択してインストールを終わらせてみたところ、すでにRETAILで認識されていたという・・・
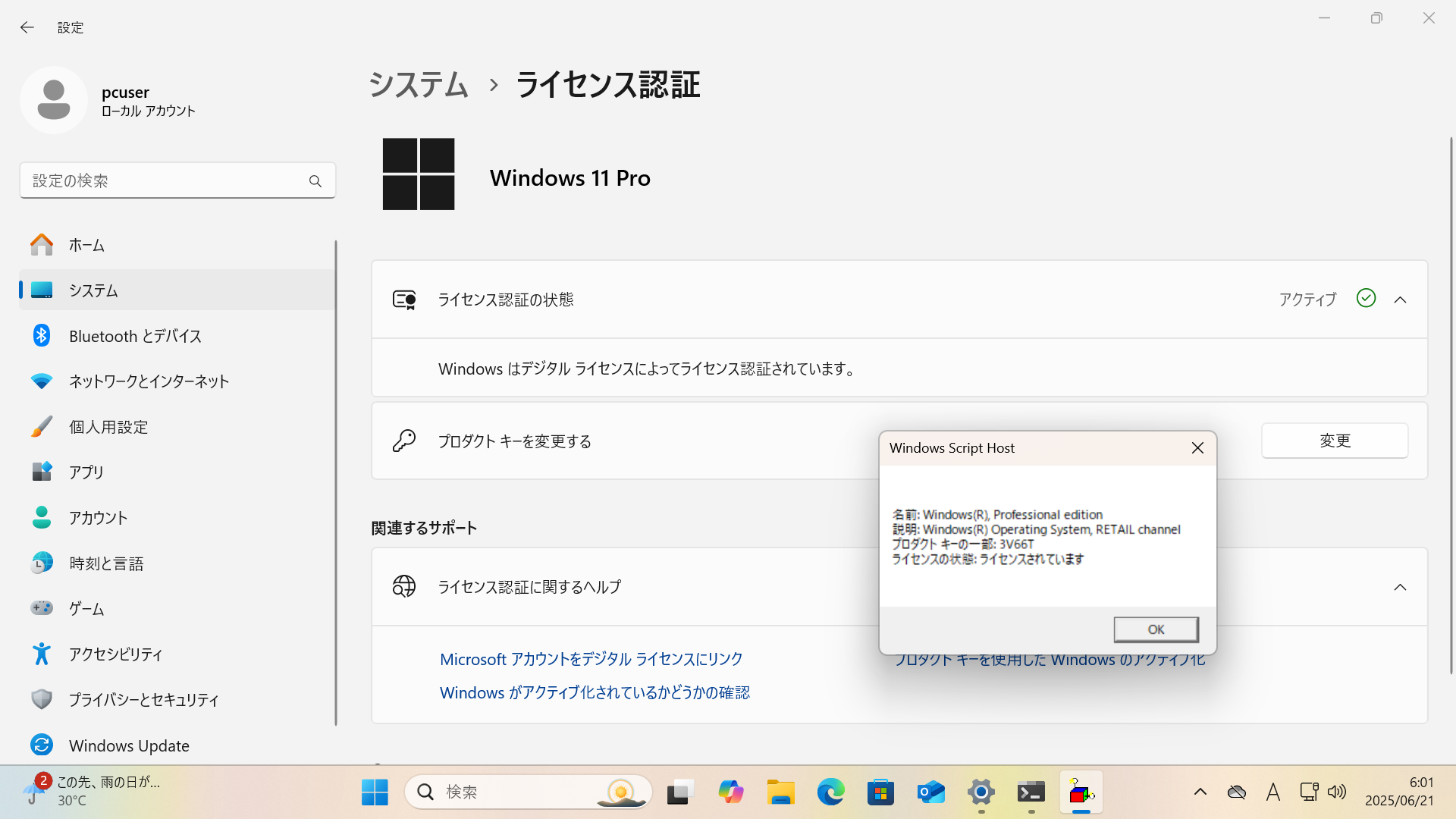
うーん・・・どういう状態なんですかねぇ・・・これ
とりあえずはWindows 11 Pro ライセンスがついてきて1万円を切っていた、というのは変わらないですね。
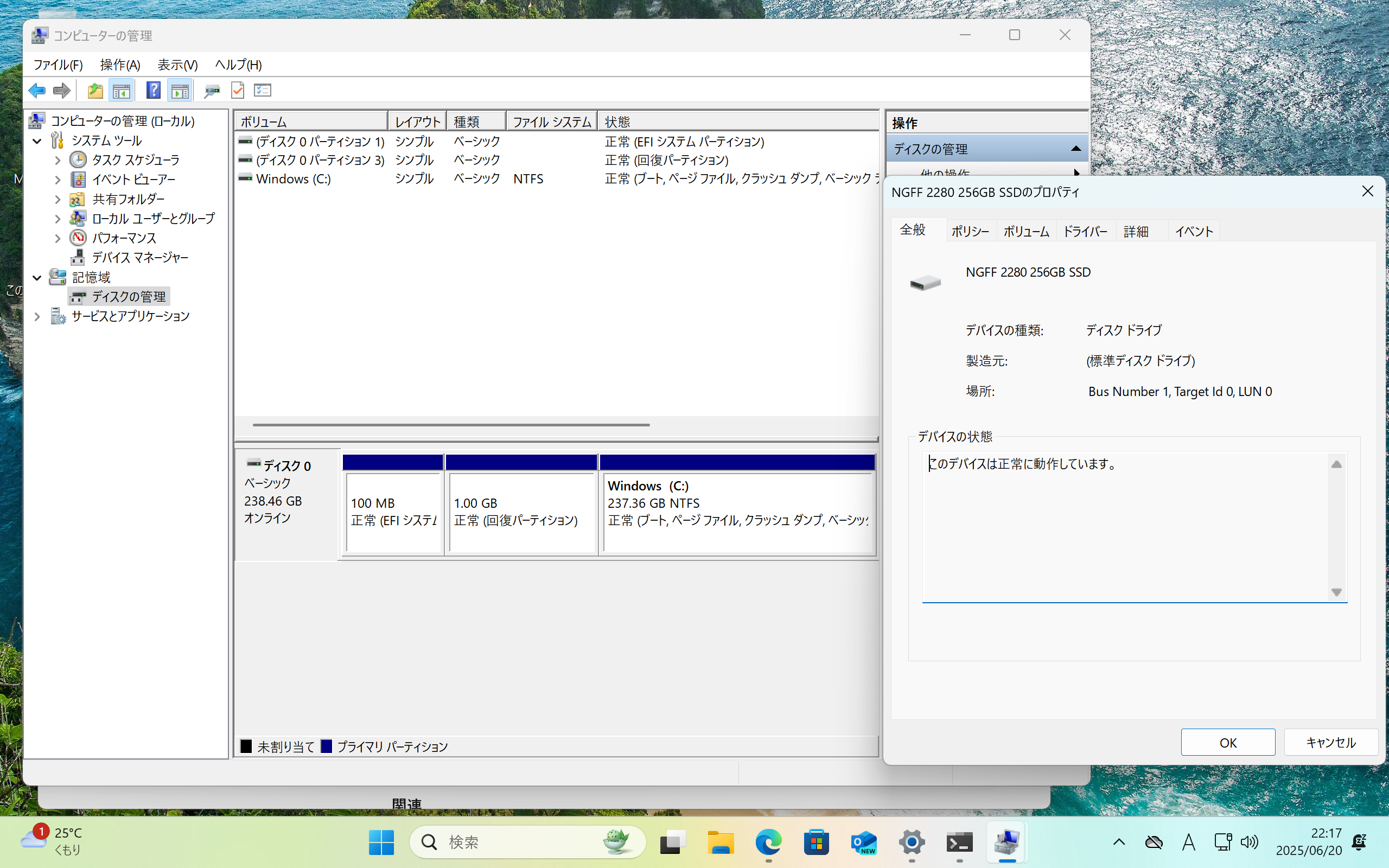
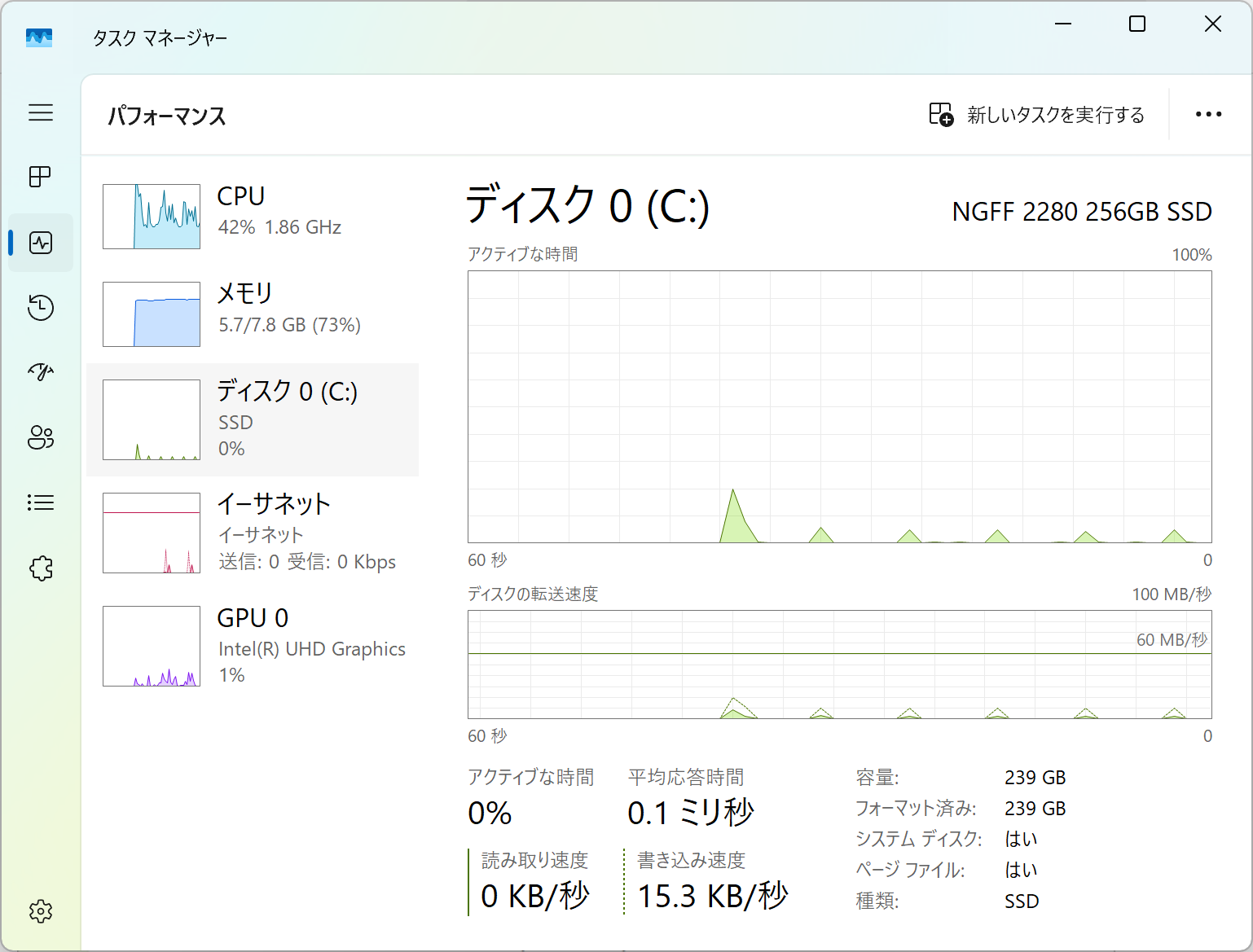
謎の真っ黒M.2 SATA SSDを確認
メーカー名なしで「NGFF 2280 256GB SSD」と認識のもの、というのは驚きです。
(NGFF 2280 は 物理的な形状のことを指している単語です)
タスクマネージャー上の認識を確認。ちゃんとIntel N95で認識されている、と
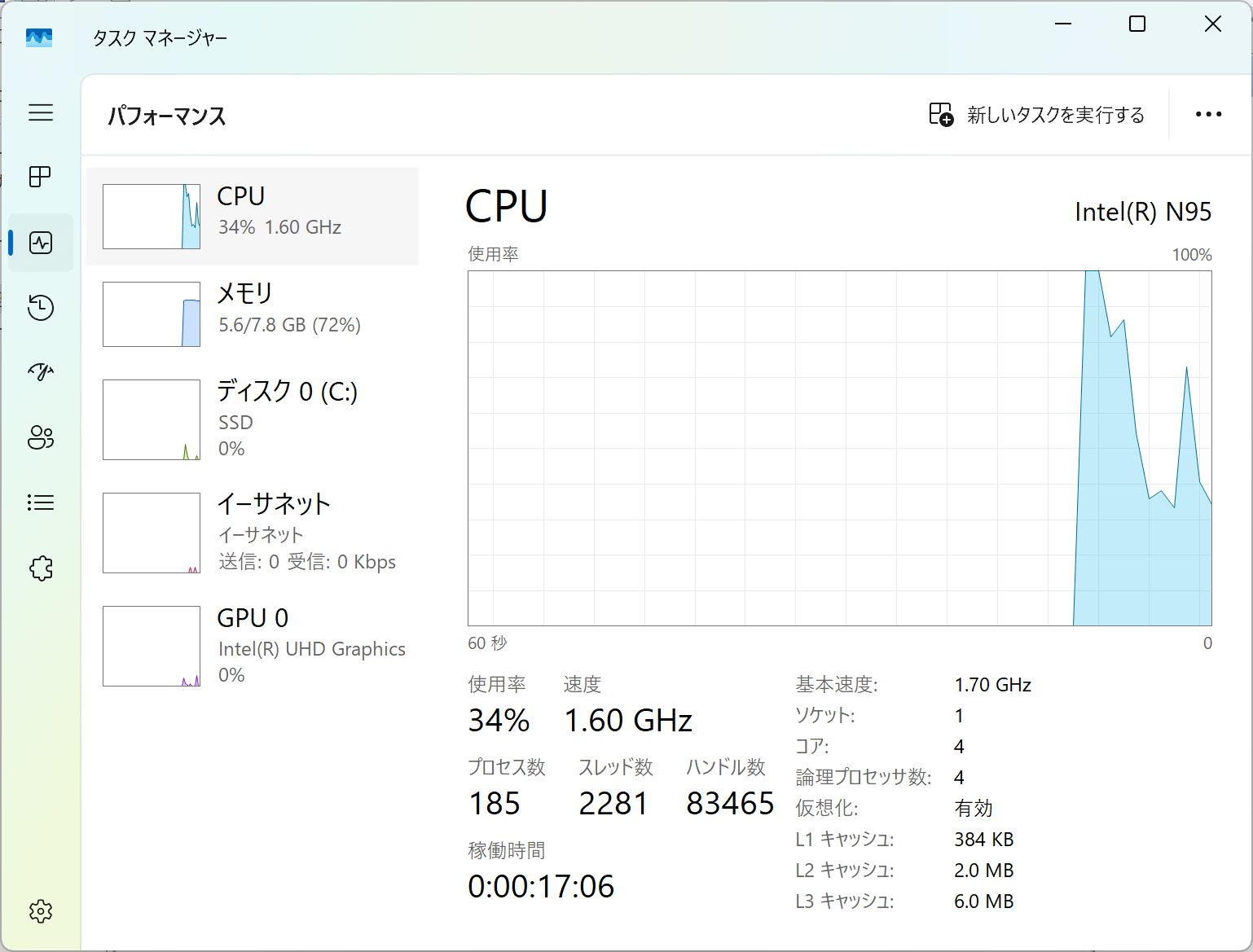
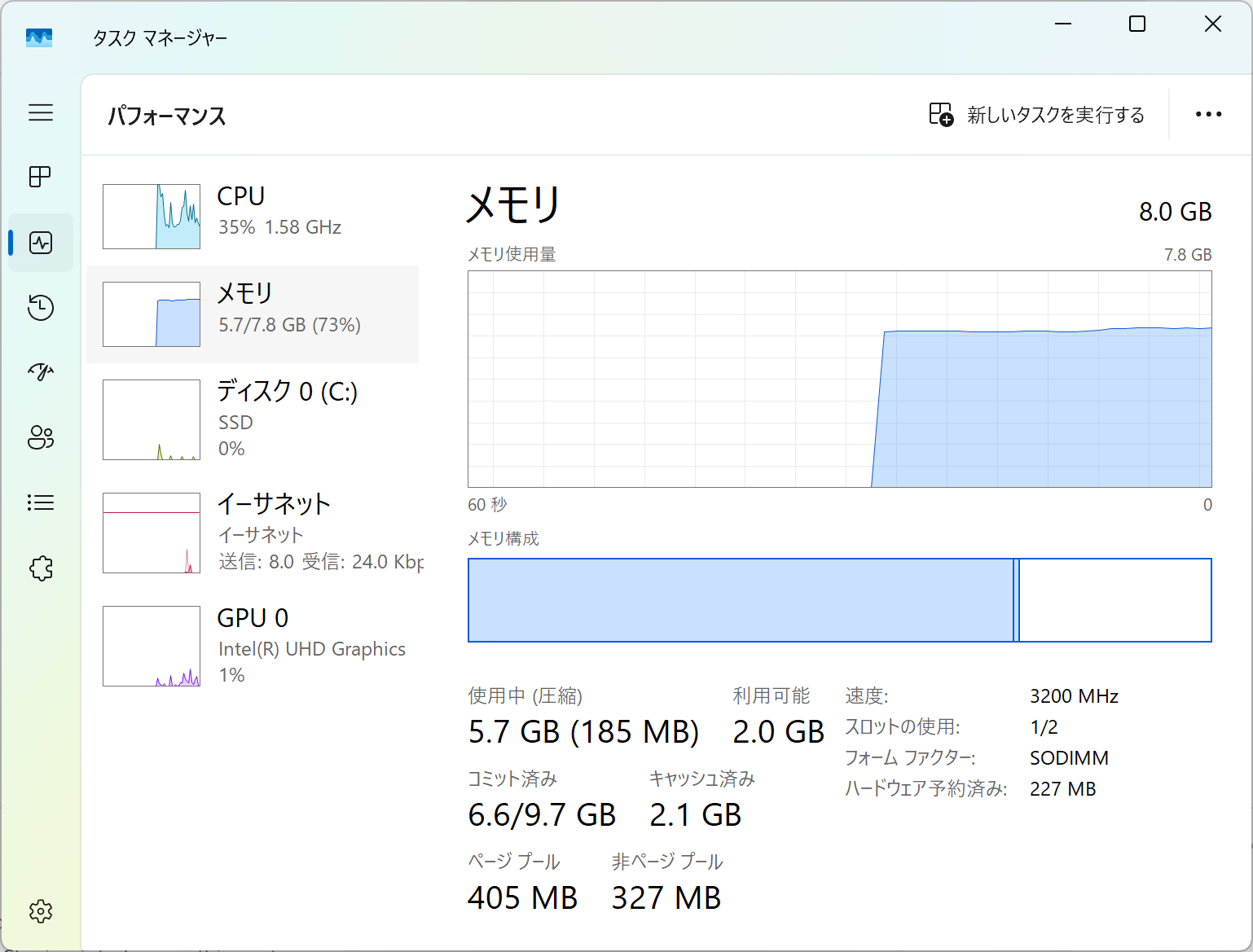
メモリはSO-DIMM DDR4 3200の8GBでした。なお、後述しますが32GBメモリが動作することも確認しました。
ディスクはメーカ、モデル名不詳のNGFF 2280 256GB SSD…まあ、256GBなので捨てちゃいましょう
プレインストールのWindows 11 Proのドライバ認識を確認・・・もちろん未認識はなし。
標準でインストールされているプログラムをスタートメニューで確認すると、Intel関連がいくつか登録されていた。
次にインストールされているアプリ一覧を確認



このうち「Intel Driver and Support Assistant」がドライバの更新があると教えてくれたので、実行してみるとブラウザが開いた
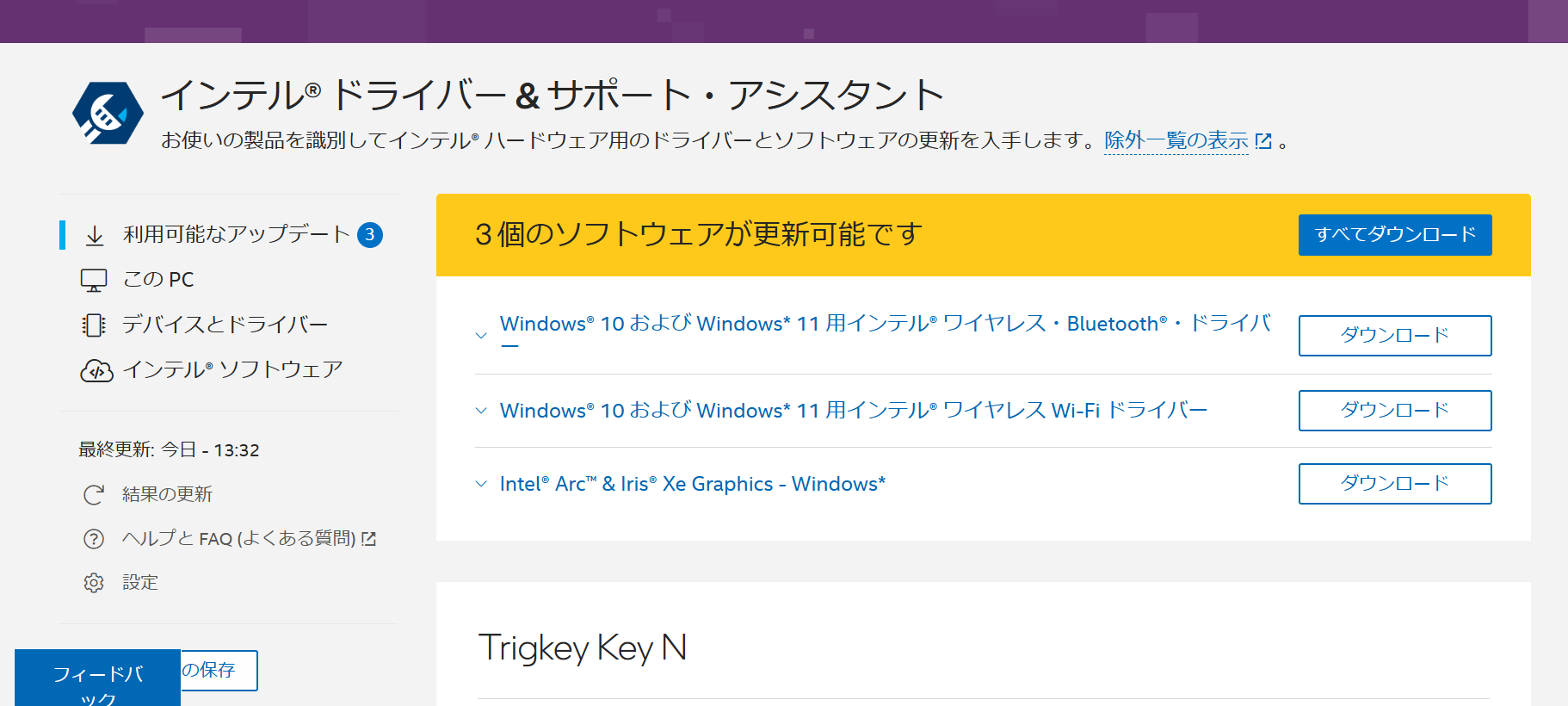
開いたURLはこれ : インテル® ドライバー & サポート・アシスタント
アップデートの詳細説明は下記のURL3つ
Windows® 10 および Windows* 11 用インテル® ワイヤレス Wi-Fi ドライバー
Windows® 10 および Windows* 11 用インテル® ワイヤレス・Bluetooth®・ドライバー
Intel® Arc™ & Iris® Xe Graphics – Windows*
SSDを別のものに交換してWindows 11 Pro を再インストールしてみたところ、標準では一部デバイスが認識していない。
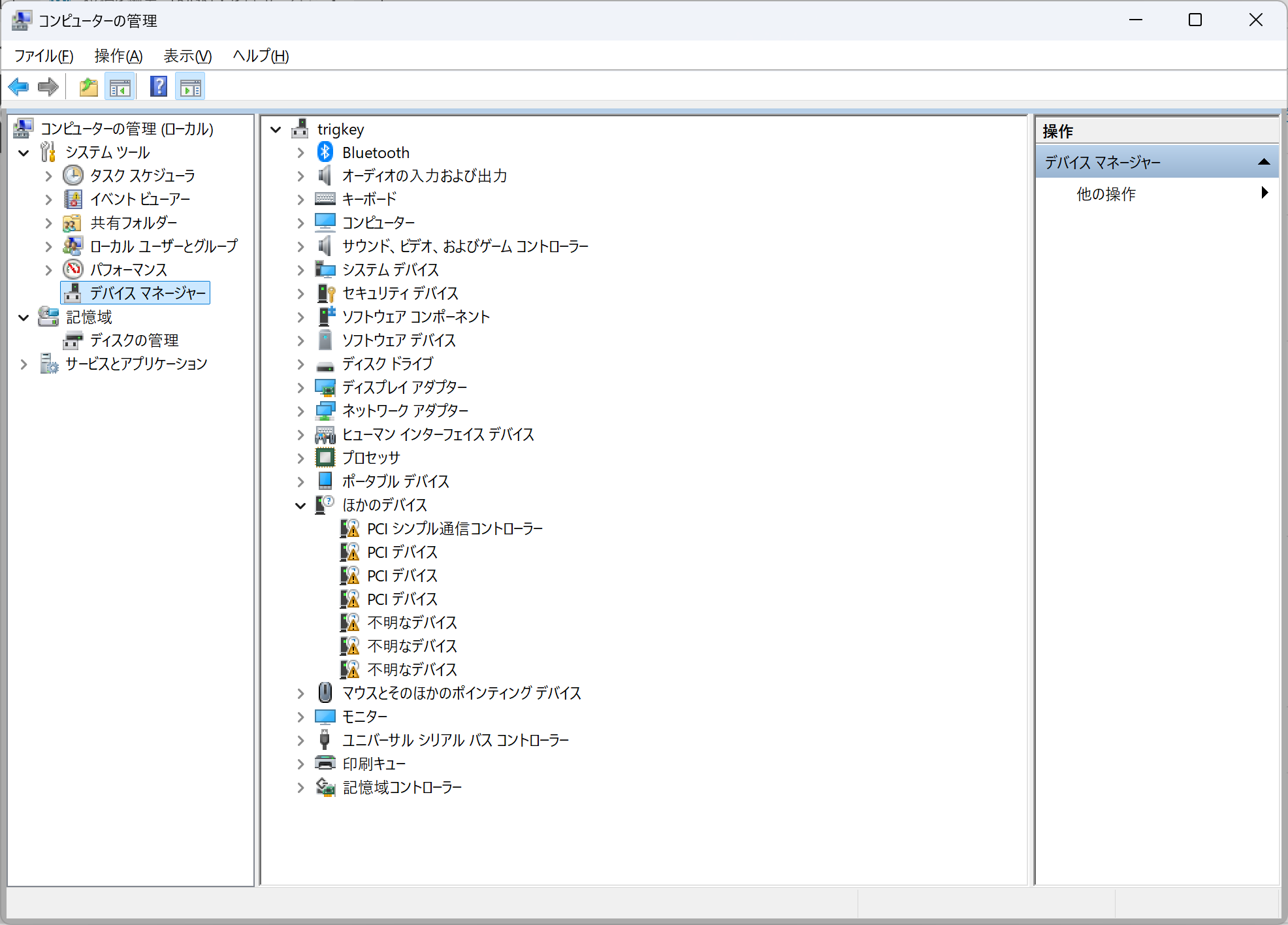
まずは認識していないものを確認しつつドライバを適用
PCI シンプル通信コントローラーPCI\VEN_8086&DEV_54A8&SUBSYS_72708086&REV_00\3&11583659&0&F0
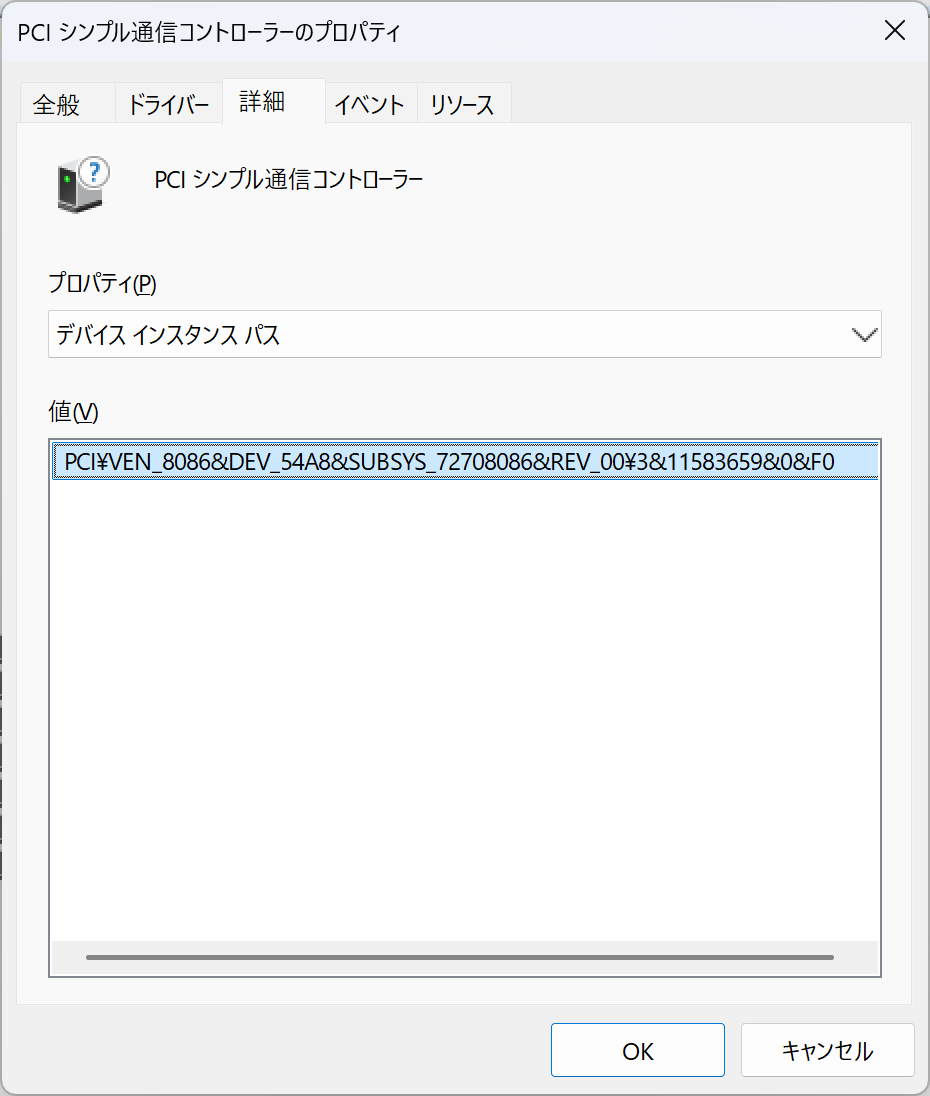
Microsoft Update カタログからドライバ適用
PCI デバイス
PCI\VEN_8086&DEV_54E8&SUBSYS_72708086&REV_00\3&11583659&0&A8
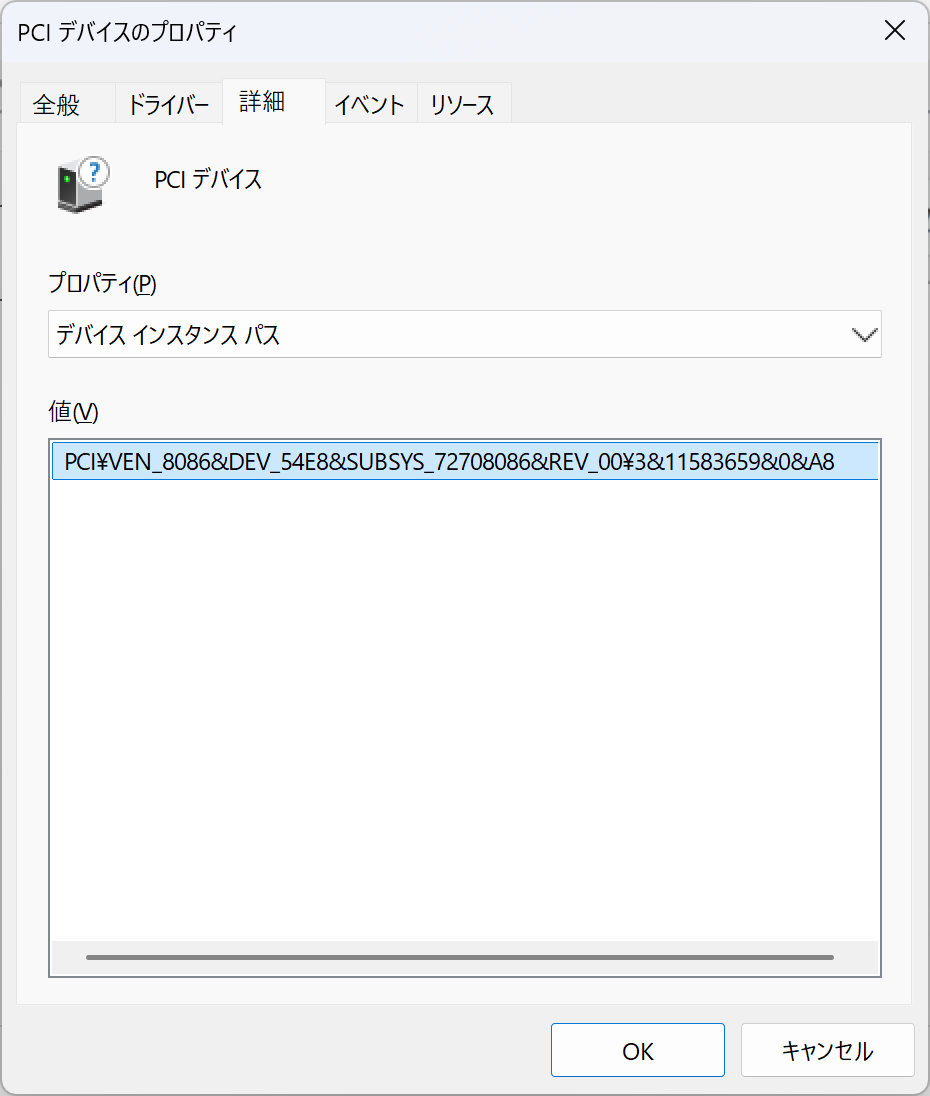
Microsoft Update カタログ からドライバ適用
PCI デバイス
PCI\VEN_8086&DEV_54E9&SUBSYS_72708086&REV_00\3&11583659&0&A9
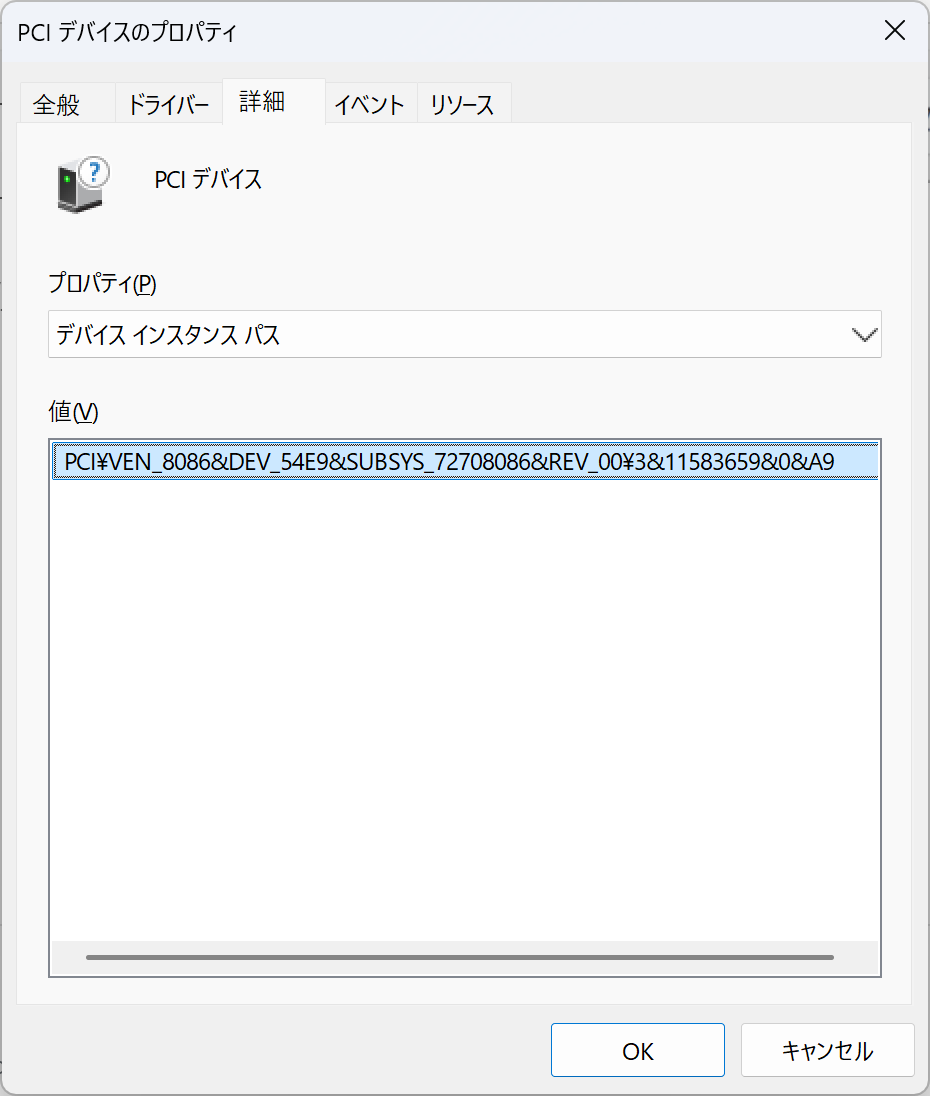
Microsoft Update カタログのドライバ適用
PCI デバイス
PCI\VEN_8086&DEV_54AB&SUBSYS_72708086&REV_00\3&11583659&0&F3
ここからのACPIの不明なデバイス3つを解消するにはMicrosoft Update Catalogで探す前にIntelページからドライバを入手する必要があった。
不明なデバイス
ACPI\INTC1023\2&DABA3FF&0
不明なデバイス
ACPI\INTC1057\2&DABA3FF&0
不明なデバイス
ACPI\INTC1024\2&DABA3FF&0
まずは、下記からINFをインストールすると、不明なデバイスが2つ消える。
ユーザーサポート インテル® Chipset Software Installation Utility
残ったものについてはMicrosoft Update Catalogで捜索する
これでデバイスがすべて認識した。
再インストール後にアプリ一覧を比較すると、プレインストールに存在していたが、再インストール後にないもので、システムの動作に影響がありそうなものをあげると以下のものになる。
Intel(R) Arc Software & Drivers
Intel(R) Computing Improvement Program
Intel Arc Control
Intel Driver & Support Assistant
Intel Unison (なお、Unisonの提供は 2025/06で終了済)
Realtek High Definition Audio Driver
インテル グラフィクス・コマンド・センター
インテル シリアル IO
インテル マネージメント・エンジン・コンポーネント
逆に再インストールで追加されているものは以下の2つ。まあ、copilotなので無視。
Copilot
Microsoft 365 Copilot
足らないアプリケーションについて、まずは「インテル® ドライバー & サポート・アシスタント」をインストールして、実行
実行するとWifi/Bluetooth/グラフィックスドライバの更新がインストールされた。
リストを確認すると、更新と同時に”Intel(R) Computing Improvement Program” と “oneAPI Level Zero”がインストールされていた。どちらもGPUコンピューティング関連のソフトウェアと思われる。
プレインストールにあった「Intel ARC Control」は古いバージョンで、現在は Intel Graphics Softwareに統合されたみたいなので不要の模様(単体ではダウンロードできない)
インテル® グラフィックス・コマンド・センターはMicrosoft Storeからインストール
Realtek High Definition Audio Driver, インテル シリアル IO, インテル マネージメント・エンジン・コンポーネントについてはドライバが適用されてるのでわざわざ追加する必要はない。
これで、プレインストール状態と同等になり問題はないと思われる。
とりあえず標準で載っていたWifi 802.11ac/Bluetooth 5.0のRTL8821CE は見た目が怪しすぎるしそもそも仕様が古いということでIntel AX210NGW に交換し、WiFi-6E / Bluetooth 5.3 に対応させました。
SSDについては余っていた512GBのM.2 NVMe SSDとM.2 SATA SSDを使ってUbuntu Linuxのソフトウェアミラーリング設定を行って試験運転中です。
さらに、32GB SO-DIMMを買って、増設してみました。
今回買ったのはWINTENのSO-DIMM DDR4 3200 32GBです
他のPCにもさしてみるか、ということで2枚セットで購入して増設しました・・・
結果無事32GBを認識しました。
とりあえず現状簡単にできる範囲でのカスタマイズはもうないなぁ、といったところです。